



Procrasti-bot
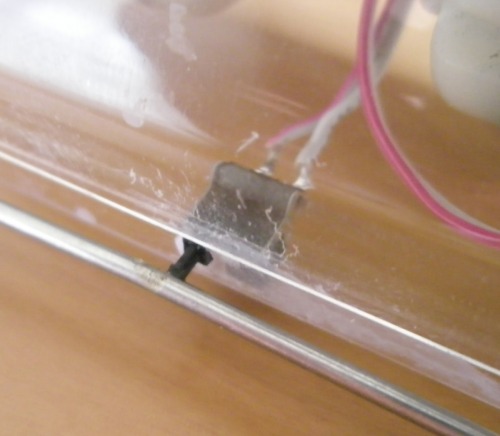
Update - added a front bumper switch
The switch is activated by a horizontal bar, and currently only triggers the camera to take a photo.

Description
This is a "robot" that has been inspired by the powers of procrastination (I have a week and a half to go before my end-of-year exams).
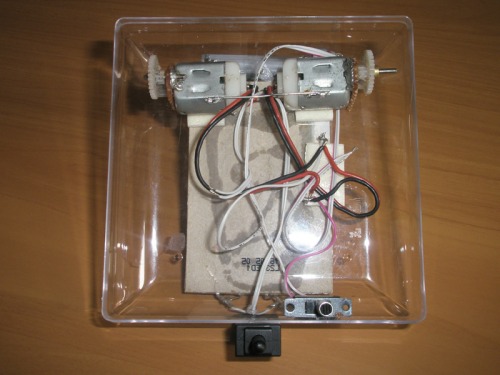
Essentially, I have coupled a simple keychain camera (takes 25 photos, at 640x480) with a mobile base made from scraps lying around. It will use the solar panel for recharging, and a very simple (BEAM-style) logic-gate based circuit to move around. The behaviour will be as simple as moving forward until hitting something, taking a photo, then turning and driving off.
This is my first really simple robot, something to absorbe a percentage of my left-over parts pile!
I have extended the press-button for taking photos via a pair of wires, and that will be connected directly to a front bumper. This took a while, as I was working on an SMD switch with a 50W unregulated soldering iron...
I will update this again, when the control circuit is more detailed that just twisted wires and a switch :)
Underneath
From the back, showing the plastic switch as a "castor"

Races around, taking photos of everything it hits
- Actuators / output devices: 2 x hobby motors
- CPU: some sort of BEAM-based system using logic gates and capacitors
- Operating system: luck
- Power source: 1 x AAA battery
- Sensors / input devices: bumper switches
- Target environment: indoor