


Prismatic Joint Robot Leg
Update: added lipo power and RC controlled steering and speed.
Achieved a little better directional control by using steering mechanism rather than just making one side use longer stride and the other side a shorter stride.
Added 3S lipo and 5 volt regulator.
Hope to change the rear servos to steer also to achieve sharper turns. This makes me wonder, can I actually turn the servos 90 degrees and make it basically turn on the spot - would it be more or less or equal in stability?
When I added the lipo battery the weight went up drastically and the left rear leg collapsed because the SG90 servo plastic gears stripped out - so replaced one rear leg servo with SG92R servo and the other side with MG90 metal gears. Need to replace two front leg servos now but will use them till they strip.
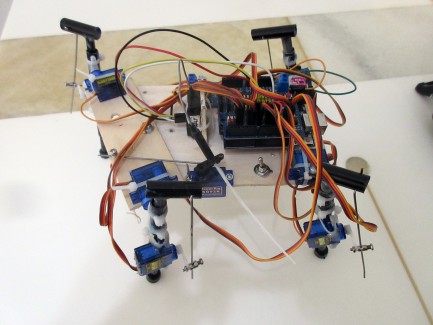
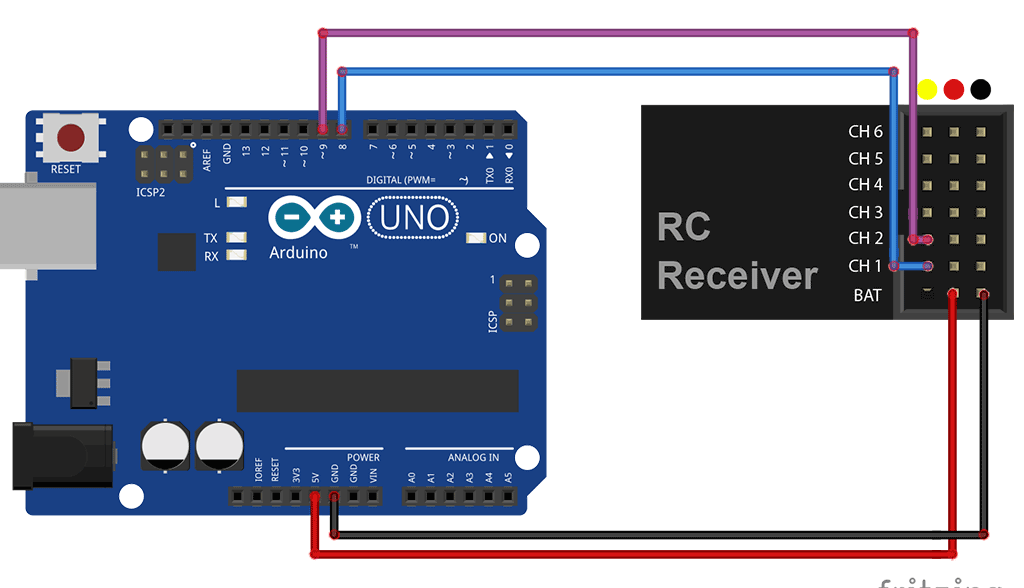
I was looking around for a way to control the robot, IR but would have to face the front of the robot with the controller, and did try Bluetooth but the phone app I was using would not work well with my Arduino code. Then found that I had the equipment already - RC transmitter and receiver. It was very easy to connect the RX to the Arduino Uno and use one channel for the speed and another channel for the steering.
Here is video of front and rear servos turned for tighter steering. Needs some work as lots of slippage and gait is not optimized for this maneuver.
Used this guys info to set up my RC gear. https://www.brainy-bits.com/rc-transmitter-with-an-arduino/
Update: all four legs installed and walking
Got all four legs working now. Needs more tuning to smooth out the gait. Not sure if I want to try installing gyro/acc and do that dynamically or just play with the parameters. Not sure how to do the dynamic bit without some math and I hate math. May just give up on it now or just sit on it till the motivation comes to pursue it further. Need a better sensor shield that has voltage regulator then can use lipo to give it some freedom from wallwart.
Used this guys chart to create gait:
Update: Two Sliding Joint Legs
Have made the second leg and with a couple of rear wheels it is walking now.
Have ordered some rubber feet to hopefully remedy slipping a little more. Notice the feet do clear the ground. Probably can smooth out the gait a little more but will wait for the other two legs. Also, had to add some weight to the back end of the frame to move the CG back nearer the wheels so that the legs would not fall over.
Original Post:
I haven't seen too many robots using sliding joints so wanted to try one out. But, a linear servo is expensive so had to DIY one with a servo and my usual fodder - fishing pole sections. Also I tore up an old flying wing and used the servos and linkage for this project. It's ok, I have two more wings that are still flyable.
So far, it looks good and is easy to program using linear interpolation to get the servos to move at the same time. You will notice in the video that as the leg pushes back, the bottom or foot joint retracts a little and then as the leg swings back, the foot slides out again. This is a little motion to try and keep the foot in contact with ground but without raising and lowering the hip or body too much. Hopefully later I can smooth it out even more and I see two ways to do it: one is to use linear servo interpolation and guesstimate it like I did here or use x-y coordinates and a formula for a curve to get a perfect result - which I will not do because I am math stupid.
Next up, I will make a second leg and attach them to a two wheel vehicle to see how well two legs work together and to experiment with some different gaits. If that goes well, then will make two more and build a quadruped.
If you are interested in kinematics and walking gaits and prismatic joint robots then you just have to check out this website and specifically C. David Remy's Saturday Morning Physics Lecture video: Gaits and Engergetics in Legged Robots Wow, this was a real education.