


Polduino
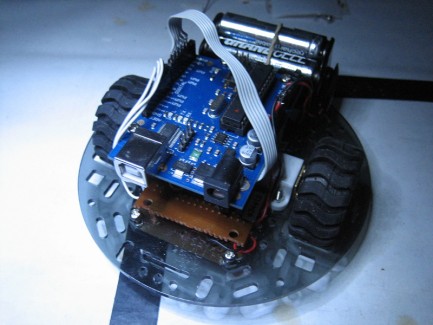
Finally broken my robot post virginity. I decided to get an arduino to see what it was all about and was surprised how much quicker you can do things with the high level language and libraries. So I've built a line follower with parts from pololu and with a few lines of code and their sensor library got it working without too much fuss. The files are attached but I had to rename the header file to .txt to upload. Just change the extension to .h if you use it.
Update 27/12/10:
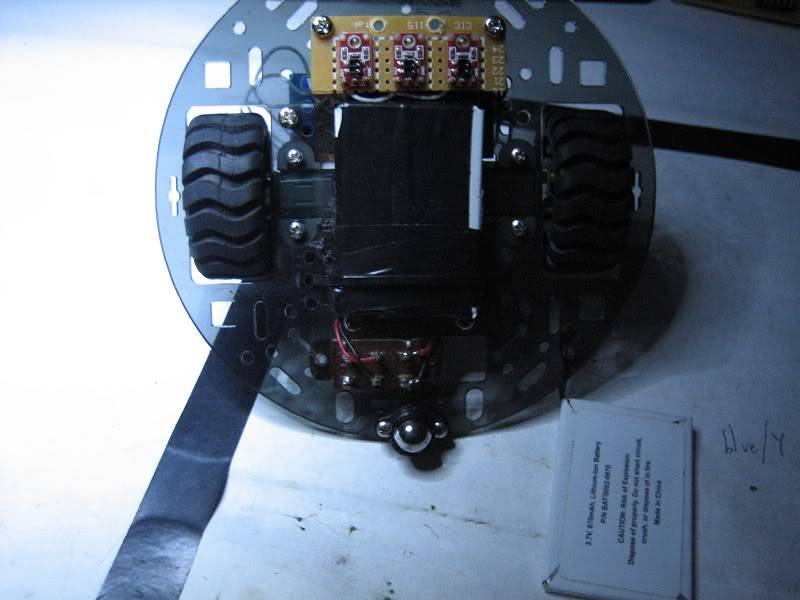
As Frits suggested I upgraded the power to a pair of Li-ion cells. I can pump them up to 8.4v giving me more than 6v at the motors. It wasn't all plain sailing. The extra power brought on epileptic fits and I had to improve the code and include pwm to the left motor because of the mismatch you get with motors. I'm happy with the result now and thanks for encouraging me to go further Frits.
Line follower
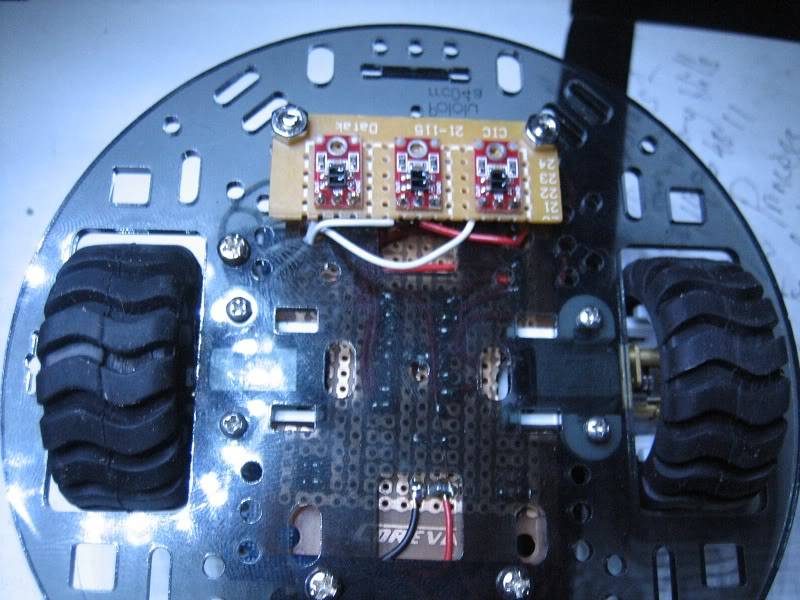
- Actuators / output devices: pololu 100:1 gear motors
- Control method: Arduino Duemilanove
- CPU: atmega328
- Power source: 4x1.5v
- Sensors / input devices: 3 pololu qtr-1rc reflective sensors
- Target environment: indoors