


Pokey the Firefighting Robot
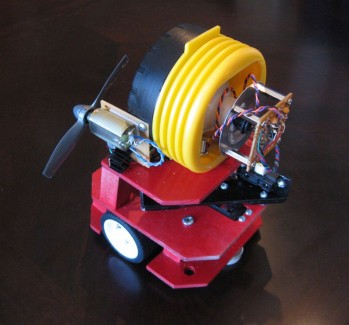
Pokey is a fully autonomous, scratch built robot intended to compete in the Fort Collins Robotic Firefighting Challenge. It seeks a lit candle in a fixed maze and puts out the candle. Or at least that's what it was supposed to do. :)
The robot uses a Pololu LV168 microcontroller board with AVR ATmega168 and built in motor drivers and other goodies. It senses flames with IR LEDs acting as photodiodes, amplified optically with a flashlight reflector and electrically with an op amp circuit.
Wall following and collision avoidance is achieved by dual Sharp GP2D12 IR distance sensors mounted at 90° angle on a servo actuated rotating array. The robot detects regulation white floor stripes via two Lynxmotion IR sensors.
The drive system is a dual motor gearbox from Tamiya using Mabuchi motors.
Chassis is made of plywood.Pokey appeared in Robot Magazine in an article on the firefighting competition. Pokey lost. :)
The robot is intended to be somewhat modular, so he's awaiting refit for his next assignment...
Seeks candle in maze and extinguishes.
- Actuators / output devices: Tamiya dual gearbox
- Control method: fully autonomous
- CPU: Atmel ATmega168
- Power source: 3 NiMH AA batteries
- Programming language: C
- Sensors / input devices: IR flame detectors, Sharp IR rangers, Lynxmotion IR floor sensors
- Target environment: Trinity College Firefighting Maze