


PJBot_V3
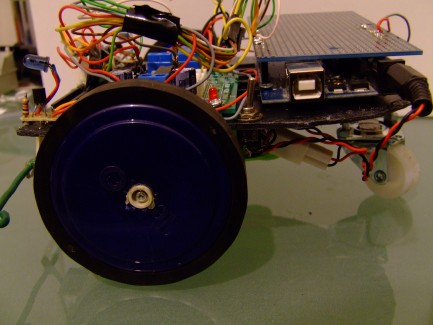
This is PJBot version 3.
The brain of this Bug is an Arduino. Now, it only go rolling and avoiding obstacles that it detects with 2 led's and 1 IR receptor.
For now it have:
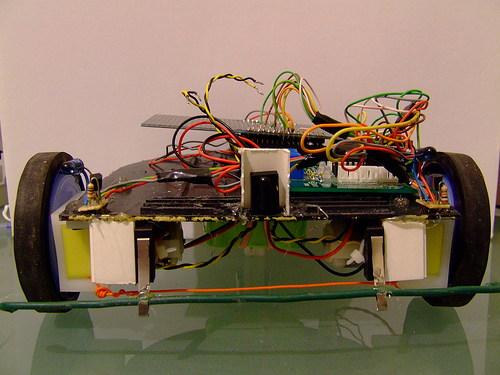
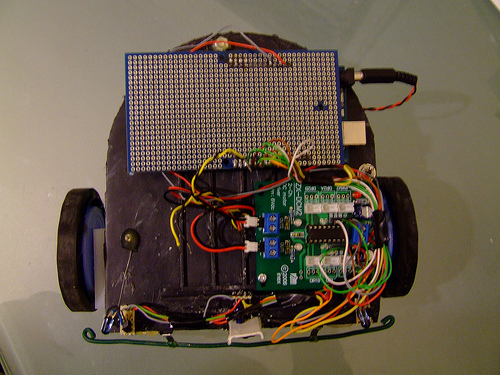
* Base - made with the plastic box of a roller blind
* Arduino
* Proximity sensor - 2 IR LEDs and an IR receiver
* Driver for motor
* 2 DC Motors
* 2 wheels - made of bottles and fish food caps, and hot glue
* 2 collision sensors - which are not connected
Ideas:
* Use an I / O expander controlled by I2C to connect the sensors and driver
* Install a RF12 transceiver
* Install an LCD also controlled by I2C
* Install a wireless camera
* Thinking of a way to use a old mouse to learn the speed and direction.
* ...
The code still has some problems and need some improvements.
I am waiting for your reviews and comments.
Navigate arround using 2 IR Leds and an IR receptor
- Actuators / output devices: DC Motors
- Control method: autonomous
- CPU: Arduino
- Programming language: C
- Sensors / input devices: IR, two front bumper switches
- Target environment: indoor