



Pioneer D3-PX
The past two days I was at Adept Mobile Robots in Amherst, New Hampshire, testing the accuracy of the Pioneer P3-Dx robot platform. This is a very rigorous robot that has a computer onboard for computations, sonar for simple obstacle avoidance and a SICK laser on top for mapping and localization.
On day one with the help of an employee at Adept, I was able to get the pioneer up and running and create a new 2d map of the office within hours using their program Mapper3. The following day I was able to get to work on testing how accurate the mapping program really is. I picked a location on the map and told the robot to go to that point at a ninety-degree angle. Once the robot made it from my work area to the location, I made marks by each tire with duct tape. Within the taped area, I found the center mark of the robot’s location by using a ruler. The next ten trials I had the robot wander first then I commanded the robot to drive to the first location and record the x and y distance from the original point. The last five trials I lined up the robot a couple feet before the goal point and then told the robot to drive to the goal point. This was a lot more successful then having the robot wander first because the robot did not have to turn that much to get to the goal point. Overall, I found the Pioneer P3-Dx to be a fabulous robot platform, with the Mobile Eyes program easy to start up and operate. The accuracy test proved that the Mobile Eyes software is very accurate and the robot can drive to a given point with little error.
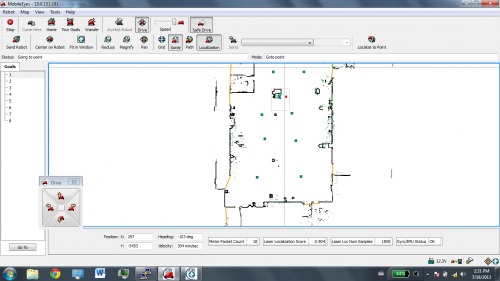
Here is a map of the office room that I was able to create with the SICK Laser on top of the Pioneer.
Navigate around via ultrasound, create 2d Maps
- Control method: autonomous
- CPU: Onboard computer
- Operating system: Windows
- Programming language: C
- Sensors / input devices: Bump Switches, ultrasound, SICK Laser Scanner
- Target environment: indoor