



Pinky, a super simple analog robot
Hello!
Just found out about LMR a week ago and I've learned so much already! This is a great community and a big thanks to all the people contributing to the various tips and tutorials, they are very helpfull.
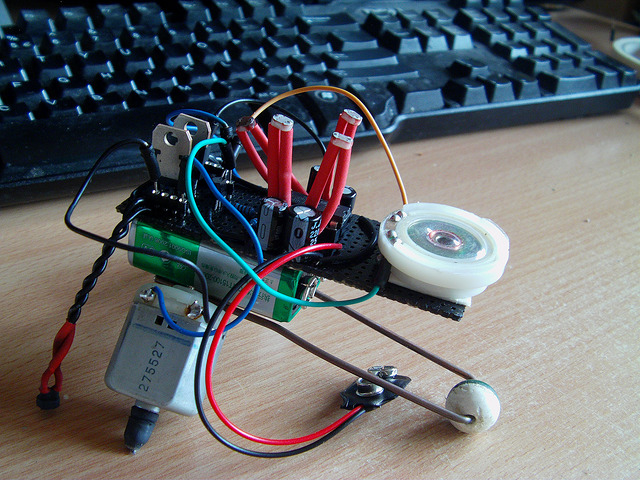
Meet Pinky, he is trying to take over the world without the brain.
I have been messing with electronics and especially diy synthesizers for some years now and I decided it was time to get something to move instead of just making sounds. Pinky is the result of an experiment I did about a year ago to control a simple robot with circuits normally used in synthesizers. Here is a video of the first one: http://www.youtube.com/watch?v=5pC42k6FOU4&feature=g-upl
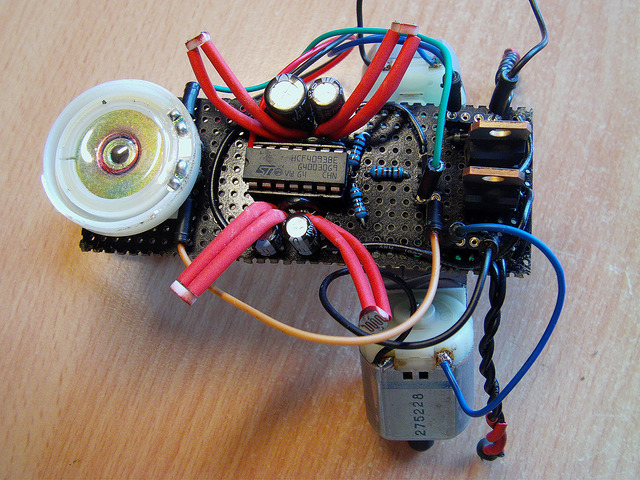
Pinky uses the CD4093 cmos ic as a series of linked low frequency oscillators. This generates a pseudo random pattern wich drives both the speaker and the motors and keeps things from getting boring. The steering is done by feeding the pattern into a light dependent resistor wich then feeds power to the opposite motor through a TIP122 power transistor. Future plans include a servo controlled flashlight with pre-programmed patterns and some more variations with other synth circuitry.
Besides this super simple analog robot Im also very familiar with arduino and I've already started a 2 wheeled robot and Im designing my first quadruped.
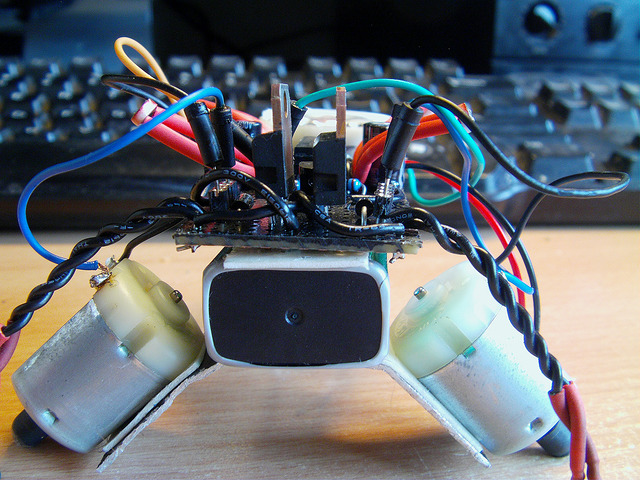
follows light
- Actuators / output devices: 2 x directly driven dc motors
- Control method: none
- CPU: just pinky, no brain
- Power source: rechargable 9v battery
- Sensors / input devices: 6 x light dependent resistor
- Target environment: indoor