



Pink Pearl
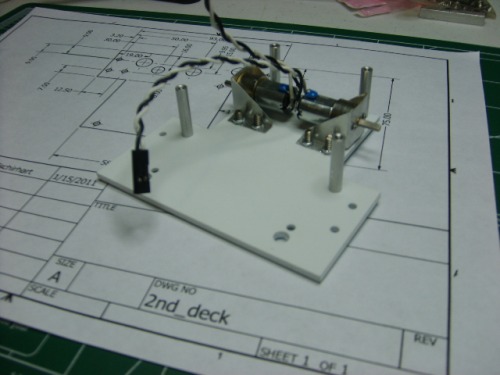
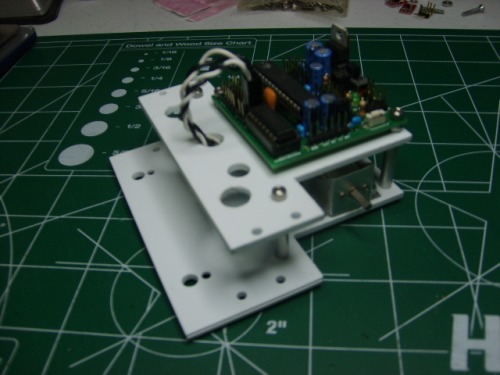
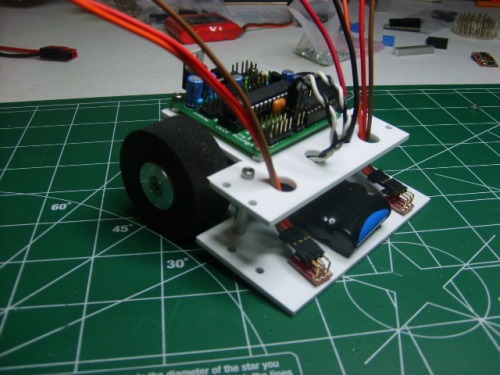
1/18/2011 - I still haven't decided what color to paint it, hence the Pink or Black in the title, but it's almost operational. I've got the line sensors, uBotino control board, motors and wheels attached. I still need to figure out how to connect the GP2Y0D340K sensors. The datasheet makes it sound pretty straight forward, though. Then I need to do some system tests and get it programmed. Last night is weighed in at around 230 grams with the battery, so I'm a little concerned it's not heavy enough. Currently, the chassis is styrene but I may have to go back and cut it out of aluminum to get more weight. Once I have it finished I'll put up the "obligatory" push the cans out of the ring video and start on mini-sumo number 2 so they can battle it out in the ring. Here are some pics during the build:
4/21/2011 - I replaced the styrene base with brass to make it heavier (see photo at top). It is up and running now in "survival mode", meaning it stays within the white boundary. The proximity sensors will be mounted when my circuit boards come in. Oh, and before Fritsl says anything, I already have the beginnings of sumo robot #2! I think I'll name it Black Bart!?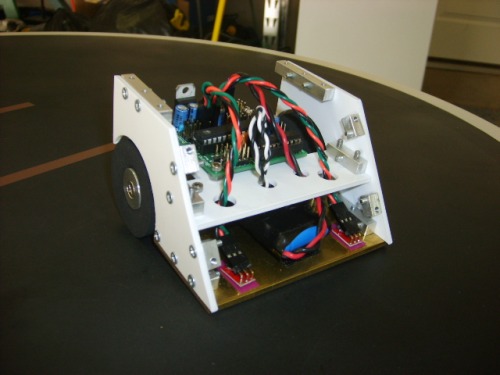
5/21/2011 - I finished the contruction. I had to change sensor strategy after I assembled my sensors on their new pcbs and found they were too big. I decided to switch to a Stampy targeting strategy. I am now using the Sharp GP20A21YK sensor on a Hitec HS-55 servo. I just have to port over the pertinent sections of Stampy's code to Arduino. All it needs now is a nice coat of primer and pink paint!
6/23/2011 - Applied a coat of primer and paint and got the Sharp sensor to track like Stampy.
Pushes other robots out of a ring.
- Actuators / output devices: GM20 100:1 mini gear motors
- Control method: Full autonomous
- CPU: atmega 328P
- Power source: 6V 400 mAh battery pack
- Programming language: Arduino C
- Sensors / input devices: GP2Y0A21YK rangefinder, Pololu QTR-1A line sensors
- Target environment: Inside a mini-sumo ring