


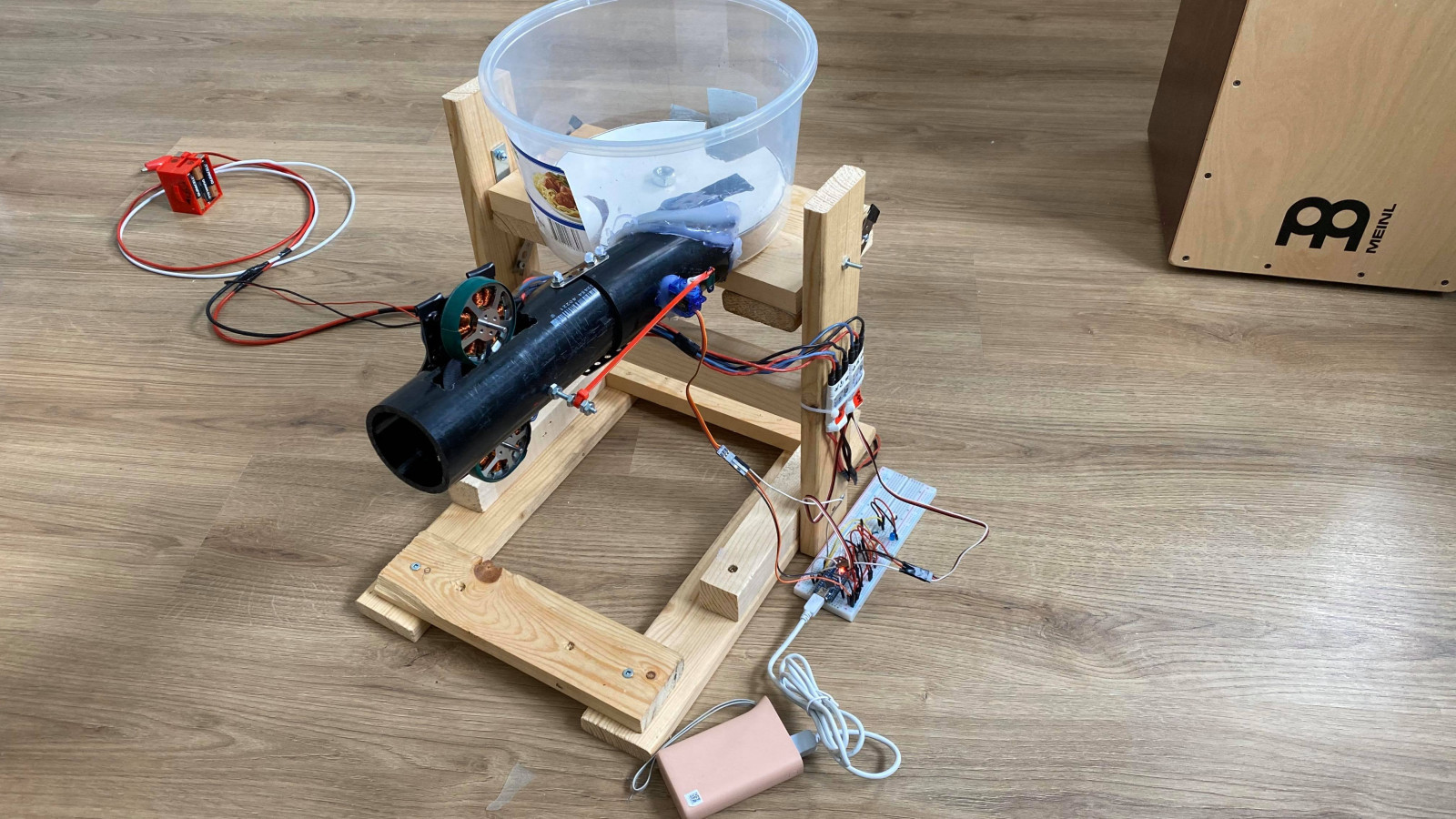
Spin and speed controller
We need Arduino to control two ESC, which handle speed of two brushless motors, if the motor speeds are different.
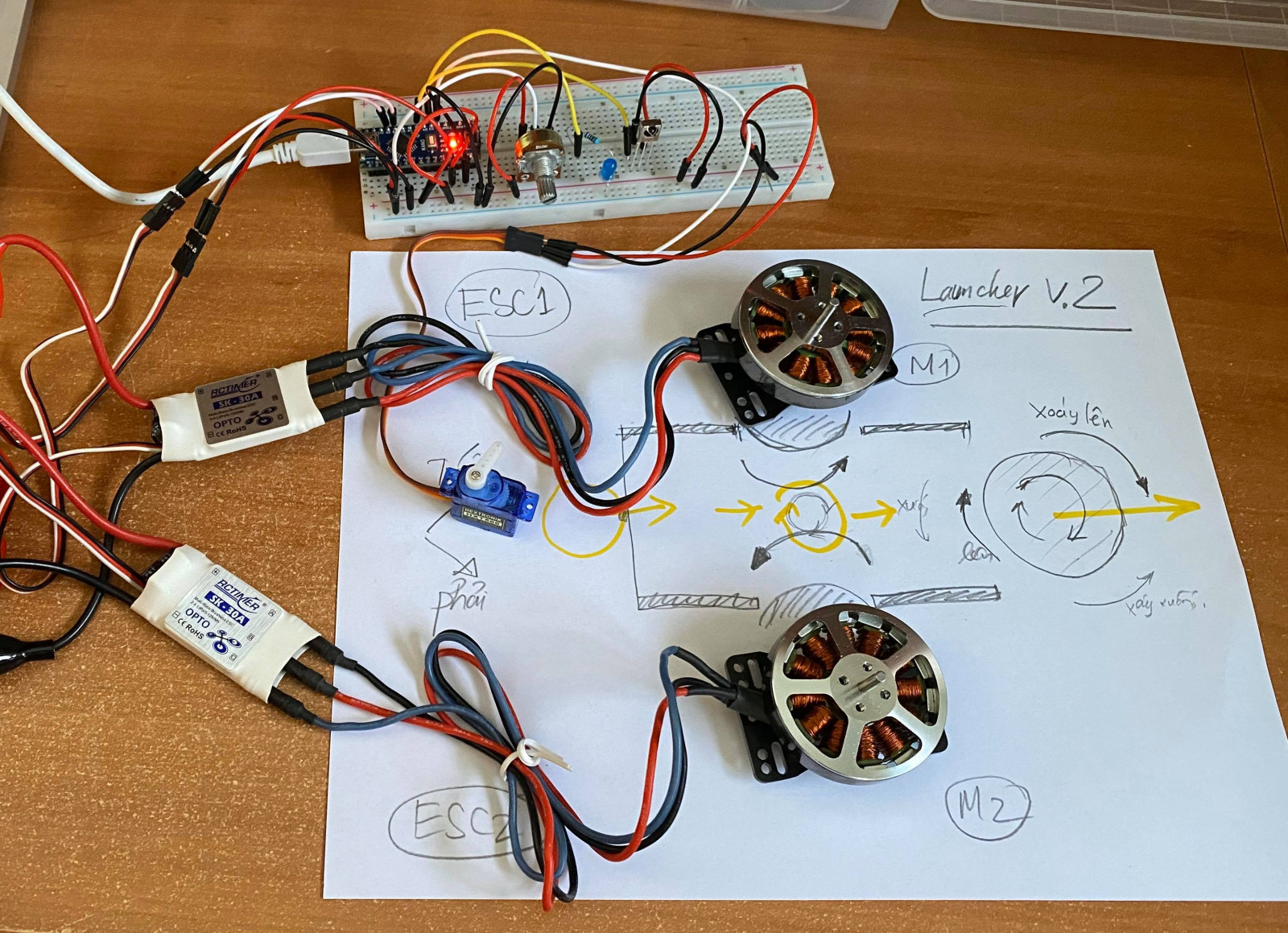
We also need a servo for direction controller.
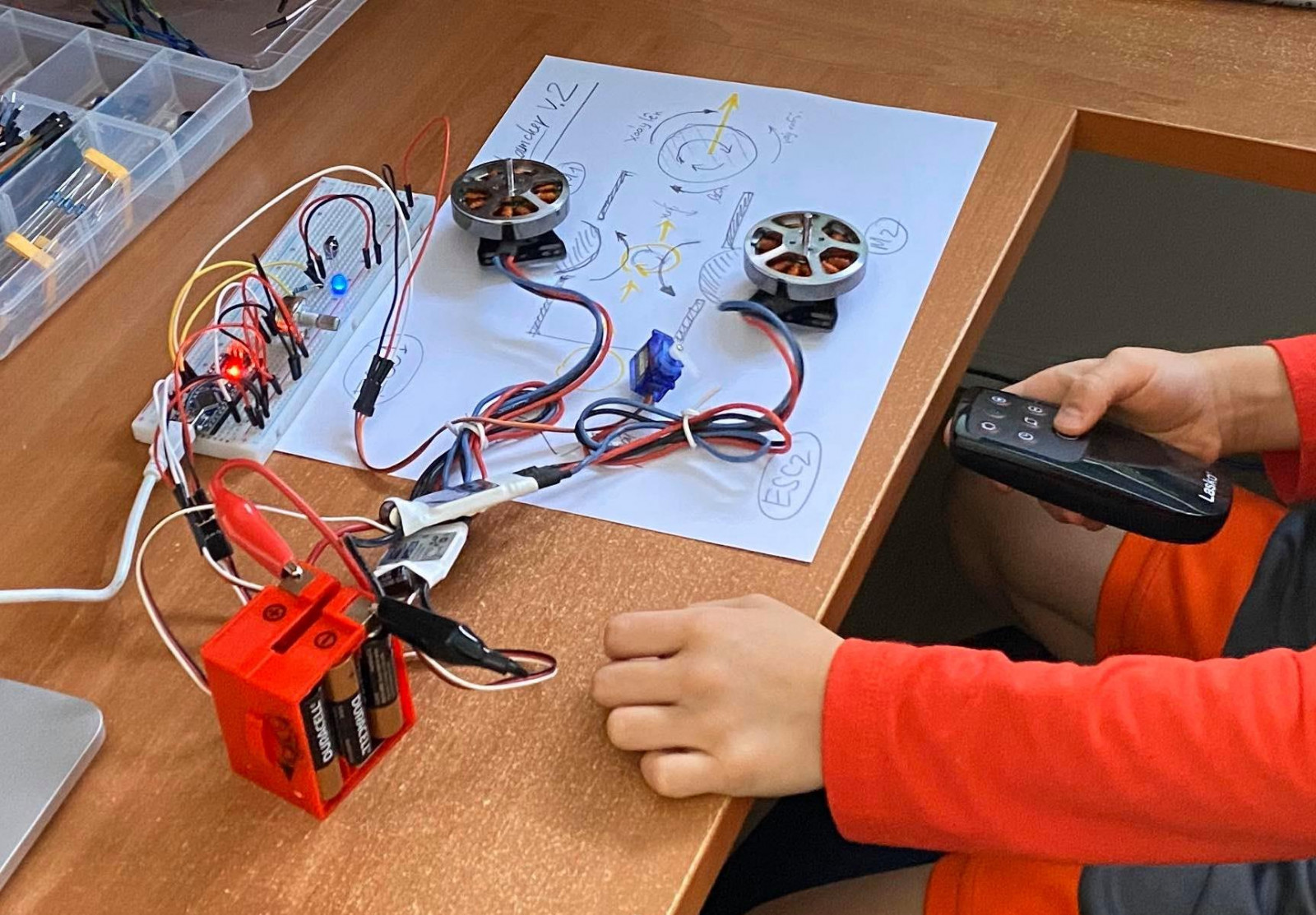
When you stand on the other side of the table, you need a remote controller. You can reuse any appliance remote, learn the code using Arduino and control the servo/motor.
This is the source code, which capture the IR signal and control the motor/servo:https://github.com/thachnb85/pingpong_robot/blob/master/pingpong_robot.ino
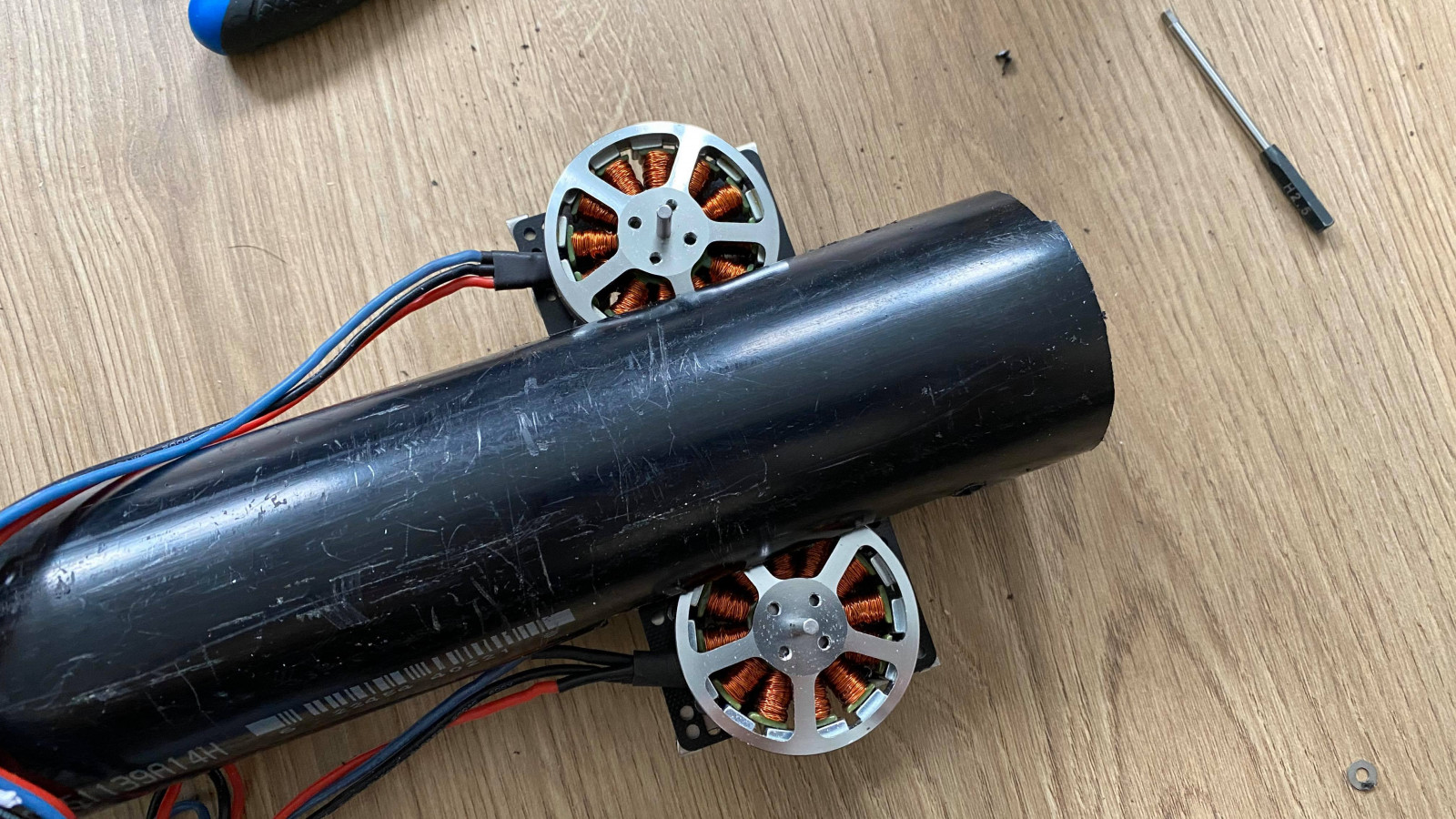
First step is to cut the pipe a space like this, fit the size of motor mount plate:

We use slotted metal string, which is very common in hardware store (for water pipe holding), then bend it to fit the shape of pipe, here is the picture with two of them, and the motor mount plate.

Hooking them all together:


We use a geared motors, 30 rpm is OK, it depends on how fast you want to load the ball.
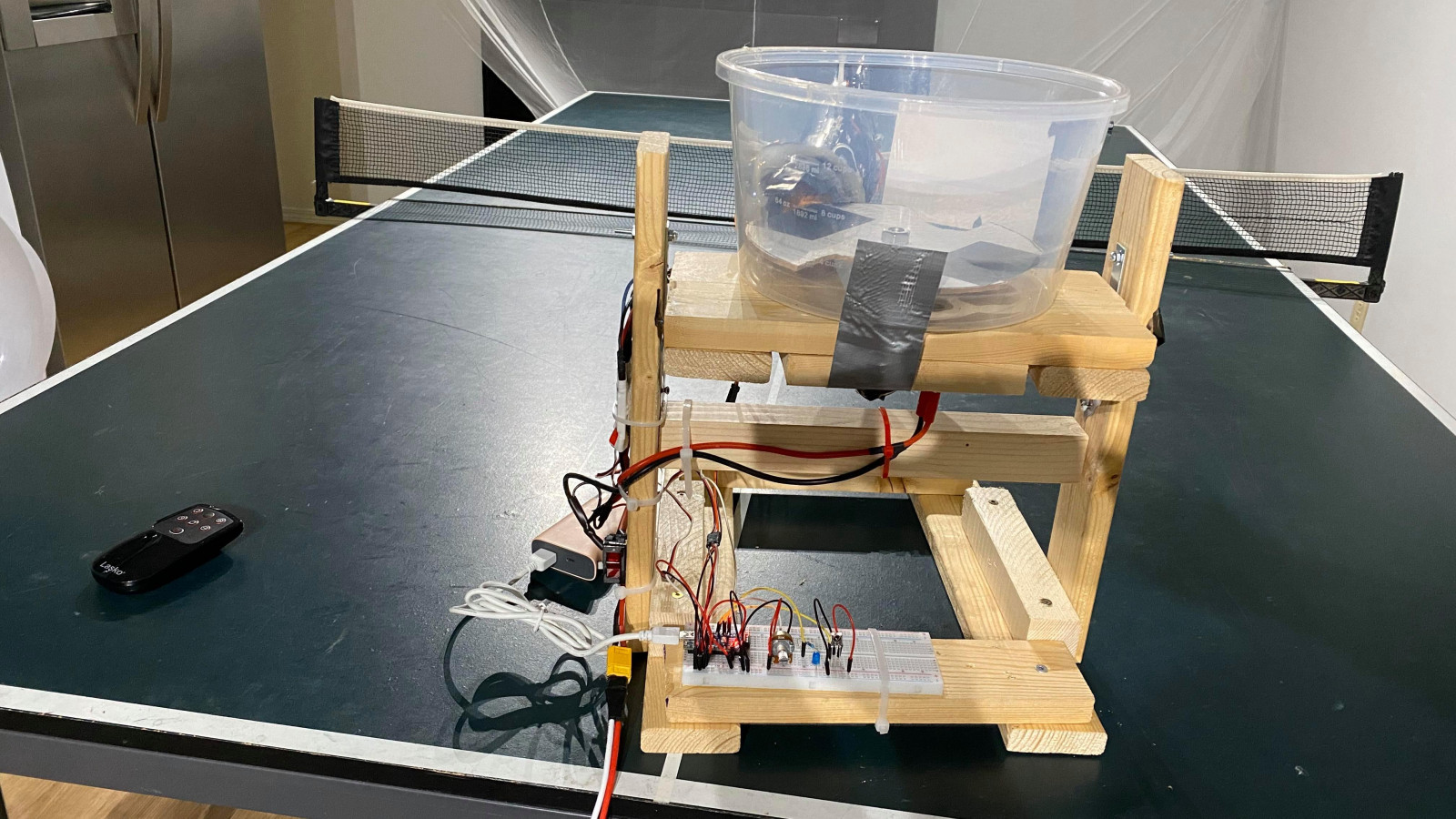
First, making the base to mount the geared motor:

Attach the motor on, up side down:


Designing a simple base:

Attaching the loader to the stand:

Drilling holes to make the loader swing:


Test the ball loader:
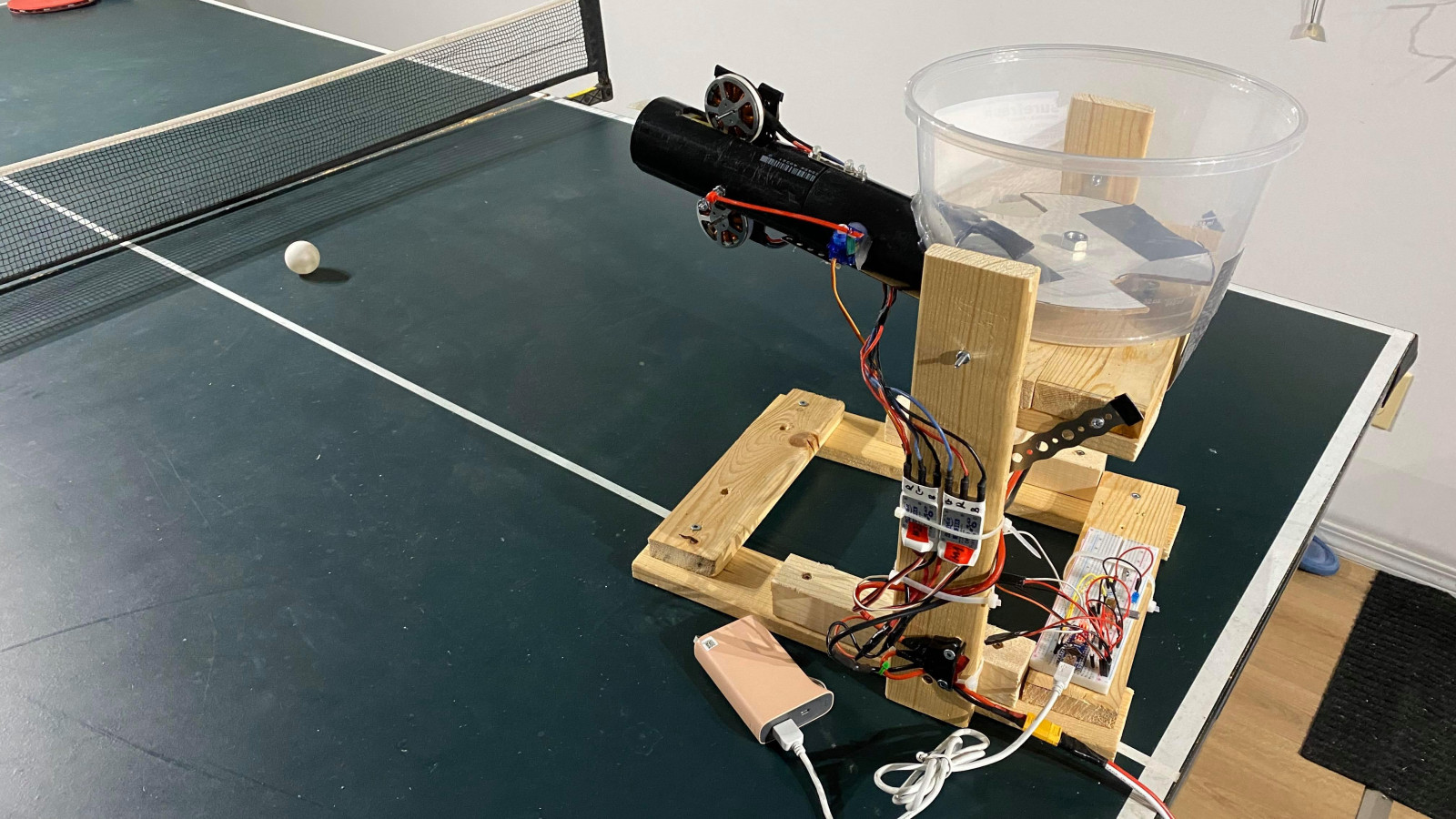
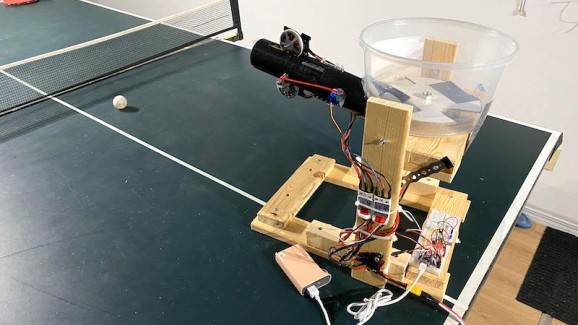
FINAL: Me vs the Ping pong robot first version