



PICKER - Line follower robot collects obstacles
Pıcker is a line follower robot which follow the white path on a black surface.
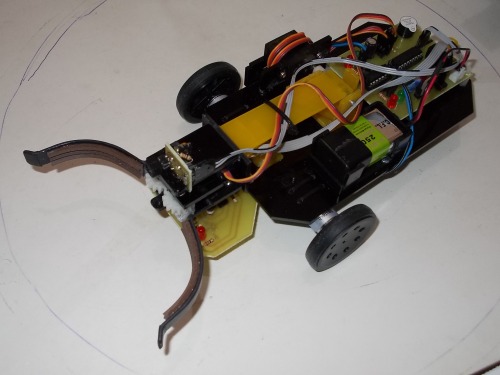
It has 3 CNY70 sensors to track the line and one additional CNY70 sensor to detect the obstacles in front of its hand.
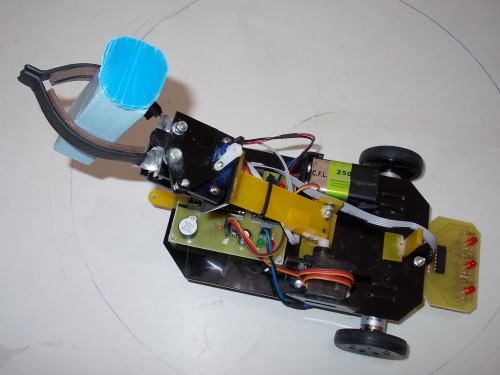
When it sees an obstacle, Picker stops, grabs the obstacle with its hand and throw the obstacle in its wagon. Then it continues to follow the path. Picker has 2 mini servo motors for its hand and arm motion. Picker is fully handmade robot.
Two geared DC motors were used for its driving. The microcontroller was PIC16F628A and the motor driver was L293D.
For my other projects you may visit my website.
Follows the line, detects obstacles, grabs the obstacles with its hand, collects the obstacles on the path