


PiBoe = Raspberry Pi + RoboPi + Boe-Bot
Back in 2011, I upgraded a standard Parallax BOE-Bot with my RoboProp propeller based robot controller.. I wrote a two part article for Servo magazine about the upgrade, and it was published in September 2011 (I got the cover!) and Octoboer 2011.
Fast forward to 2014, and once I designed my RoboPi controller for the incredibly popular Raspberry Pi, I could not resist trying to control a Boe-Bot chassis with a combination of RoboPi and a Raspberry Pi.
Today, on the Parallax forums, Thomas asked about controlling a Parallax Boe-Bot with a Raspberry Pi.
I decided it was time to post about PiBoe, so I started a build blog for it at http://www.mikronauts.com/robot-zoo/piboe/
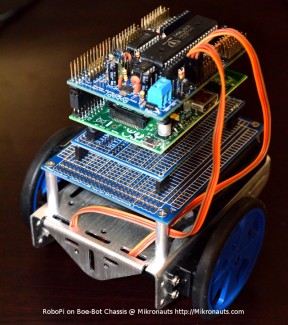
Right now, PiBoe consists of: (top down)
- RoboPi
- Raspberry Pi Model A
- EZasPi (B)
- EZasPie Proto 300
I am thinking about eliminating the EZasPi (B) by drilling two mounting holes in the Proto 300, and mounting the Pi on it - thus reducing the height of the bot.
(I am currently working on two other Pi based bots, Elf (with gear motors) and HexPi (with 18 servos). Elf will be getting an update soon, HexPi is waiting for the current sensors I ordered to arrive.)