


Physi the *robot*
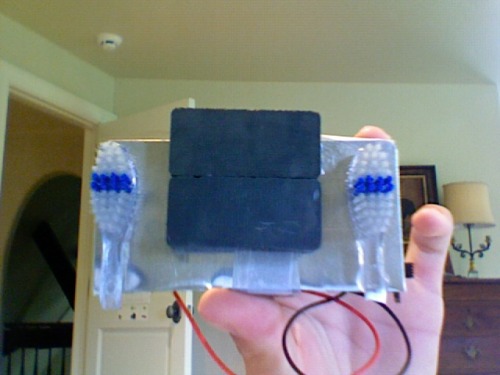 Ok, so it's not really a robot, it can't make decisions nor can it think what-so-ever because it has no microcontroller. However, running on vibration motors from 2 Xbox controllers I ripped apart it can drive around and bounce off walls. It has no wheels, only two toothbrush heads whose bristles vibrate when the Xbox motors are on.
Ok, so it's not really a robot, it can't make decisions nor can it think what-so-ever because it has no microcontroller. However, running on vibration motors from 2 Xbox controllers I ripped apart it can drive around and bounce off walls. It has no wheels, only two toothbrush heads whose bristles vibrate when the Xbox motors are on.
There are 2 heavy magnets on the bottom that change its center of gravity thus affecting how it moves. Because of this, I have named it "Physi" as it helps to explain simple physics concepts.
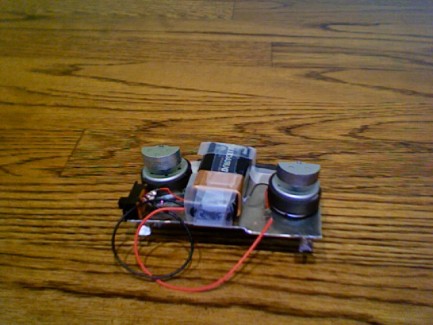
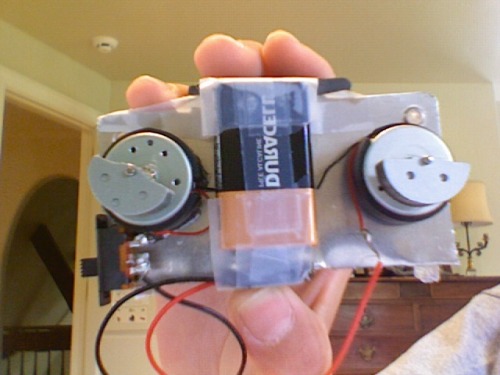
I cut a piece of scrap-metal I had on hand to make a base. I then attached 2 toothbrush heads to each side of the bottom with hot glue to simulate wheels. After ripping open 2 Xbox controllers I pulled out their larger motors (there are smaller ones, but they aren't nearly as powerful) and hot glued each right above the corresponding toothbrush head. I soldered the 2 black motor wires (you have to cut off the plastic boxes at the end) together. I then soldered the left motor's red wire to the red wire of the 9v battery holder. The battery holder's black wire was soldered to the switch. Finally, the right motor's red wire was also connected to the switch.
This was all done in under 20 minutes with parts I had on hand. If I can do this, so can you.
I don't want to call this my "First robot" because quite frankly it's just too pitiful. I'm working with the BASIC Stamp right now, and I've ordered some parts from Sparkfun.com to make something remotely intelligent.
I have more picture on my desktop, but it won't let me import more than one except online images. What should I do?
If you have any questions or comments please let me know.
Physi rides around on 2 toothbrush heads.
- CPU: none
- Operating system: none
- Power source: 9v battery
- Programming language: none
- Sensors / input devices: none
- Target environment: indoor on smooth surfaces