


Perpetual Ball Roller
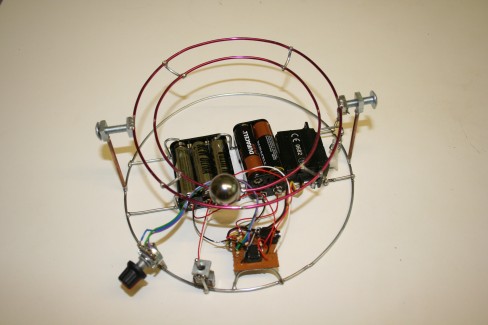
This machine is controlled by a PicAxe Microcontroller. A servo (used for steering in R/C cars) is used to tilt the track for a ball to roll round. The degree of the tilt can be controlled by a potentiometer in manual mode or in automatic mode preset instructions on the microcontroller tell the servo how to move.
I struggled to find a name for this. I eventually settled on Perpetual Ball Roller. I like the "perpetual" part because it gives an idea that the ball will just keep going round and round but the name doesn't really describe what it is. I can't believe someone else hasn't made something similar but because I had no idea what to search for on Google I haven't found anything. If you are wondering what it is the best thing to do is it to watch the video. I'll detail some of the features here incase I didn't mention them on the video or you can't watch it.
There isn't really a simple figure of how long it took to make but I'll try and give a rough idea. The main construction of the frame and ring took about 3 hours. I'm not too bad at this kind of work as I have done quite a few similar things before. It took about 1.5 hours to wire up a very simple Picaxe circuit with servo and potentiometer and put the code on for very basic control with no limits. I realise this might be a bit slow to some people but I tend to take electronics slowly. I then spent another hour mounting the servo properly (before it was held down). For the actual coding of the different routines maybe 5 to 6 hours. You could do these in a lot less time (2 hours easily) but I was in no hurry and wanted to experiment. All those add hours add up to 12 hours (rounded up!).
Rolls a ball around a ring
- Actuators / output devices: Servos
- Power source: 3AA for logic circuits, 4 AA batteries for servos
- Programming language: Basic
- Sensors / input devices: potentiometer
- Target environment: Indooor, desktop