



Pepper-E Salt
hi all! Well KT was a flop ( I just had way too many design errors) but after some encouragement around LMR I was inspired to make Pepper-E Salt, a robotic kitchen buddy. A basic 3 servo hexapod with a mean look and a build strong enough to carry various spices across the counter. Im not sure how thats gonna look as far as programming goes, but Im workin on ideas lol. As I once heard CTC say "Just make one thing work" as a theory of robot building. Right now the idea is basic movements, which I have a pretty good idea about thanks to the forum, so I'll update with more info and pics, thanks guys!
****************9/21*************
Just a small update, I got it walking! Problem is, It only walks when I hold all of the batteries (it cant carry the weight). The middle legs keep giving out. :(
However I have a solution! those little popsicle legs need feet! adding feet would keep the center legs from bowing out of place and help it walk. The glue is drying tonight but hopefully tomorrow ill have this baby walking right!.
I do consider it a success so far, the walking idea that CTC and the gang showed me works great! Now its just getting the body reinforced enough to be able to carry it out. thanks all!
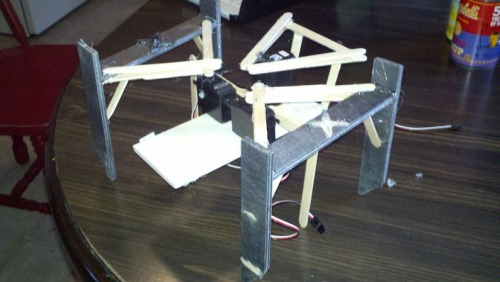
***************9/24**************
SLOW progress! I added some feet to stabilize the center legs. I have been working on some simple code but could not figure out what was wrong.... then it hit me. The servo controlling the middle legs is too weak to lift the body weight. If you know how 3 servo hexapods walk you know thats kind of important. :) So Im off to get a new servo tomorrow hopefully. Once the body can the lifted I can have the other legs act like they should.