


Penny - An Arduino SHR
Introducing Penny. She's beginning her existence as a Start Here style robot. However, she's based on an Arduino Mega.
- Video 1: Early testing of the servo and Sharp IR sensor used to test my code.
- Video 2: Penny prototyped on a breadboard and running fine
Chassis
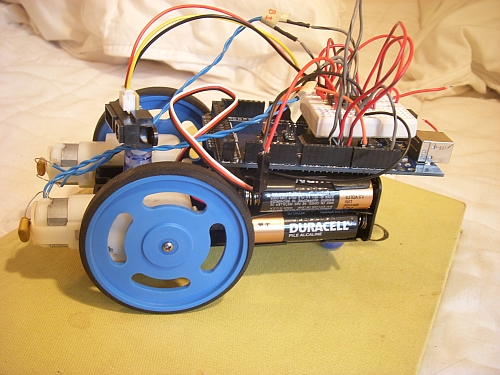
I re-used the motors, wheels and chassis from my original SHR, which has been gathering dust for a while.
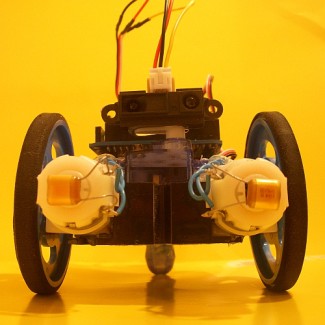
Penny is configured back-to-front from the old SHR, with her drive wheels in the lead. I set the Sharp IR sensor back as far as practical, since it doesn't work well closer than 10 cm anyway.
The messy breadboard will get cleaned up. I plan to use Ro-Bot-X's Arduino shield for building robots, which will take care of .some of that wiring for me.
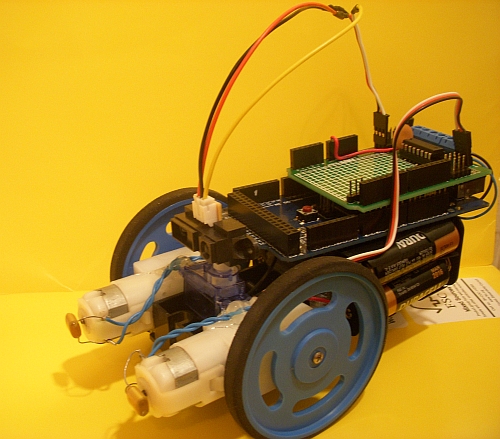
Update 2010-10-05: I have received the Ro-Bot-X designed Arduino shield and gave Penny an upgrade. Look at her now. Quite a difference!
Code
Penny 1.0 is based on a straight translation of fritls' Start Here code for the Picaxe. This is my first Arduino robot, so I wanted to start simple. I'm very pleased with the result.
I have attached the original code as well as an updated version that is fit for the Arduino shield and adds a backup function.
Electronics
I'm using an SN754410NE dual h-bridge motor driver. No other electronics yet.
Execution
As you can see in the 2nd video, Penny is working fine. I adjusted some parameters, like how far away she reacts to an obstacle. There's plenty of room for enhancement of the basic SHR code, and I'll use Penny as a platform for learning more about the Arduino.
Future
The future is bright for Penny. I have a lot of possible enhancements with an Arduino Mega as the brain power. We may see features like:
- Wheel encoders
- PWM
- Line following
- Edge/cliff detection
- More actuators
- Perhaps... penmanship
- Actuators / output devices: 2 GM9 from Hobby Engineering with upgrade, DAGU mini servo
- CPU: Arduino Mega
- Power source: 4xAA alkaline batteries
- Programming language: Arduino
- Sensors / input devices: Sharp GP2Y0A21YK0F IR sensor
- Target environment: Indoors. Carpet or smooth floors