



PenguinBot
UPDATED: 04/25/14 Added Bluetooth for remote control, and a Nerf Launcher! Go read my Blog!
UPDATED: 04/15/14 (Added Two new Videos)
After seeing the Awesome Hurby Bot, I thought I would have a bit of fun. 
My wife is out for the weekend, lets see what I can conjure up!
I started with (very noisy) Penguin toy that has not worked in a year or so. We left the batteries in it, and they leaked all over the inside, corroding the leads to the motor... Hmmm... fix it as is? Or make it AWESOME!!!
So, of course I chose AWESOME!
I expect this build to take a day, with some code tinkering over the next week.
So what do we have to start with, and what can we add?
The penguin toy itself had an odd combination of two wheels at 90 degree angles to each other. These would alternately spin causung a very strange walking pattern. It also had an offset gear rocking a lever inside, with a plastic ball attached to the top of the penguin body with velcro.
While walking the penguin would rock back and forth, screeching, as penguins do. (I want to preserve this motion.)
So, first thing to do was find two SMALL DC gear motors to provide proportional steering. A trip to the dollar store, and I had what I wanted. A pair of cheap locomotive engines with 3v DC gear motors!

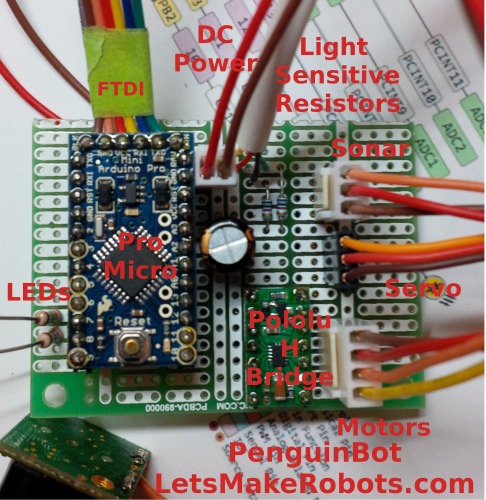
I will use an Arduino Pro Mini to run this Bot, the motors will be managed through a Polulu DRV883 H-bridge.
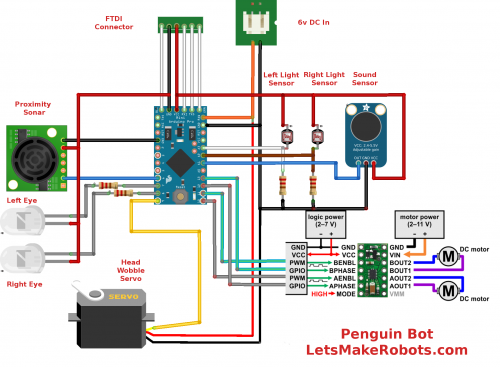
For obstacle avoidance, I will be using a MaxSonar EZ1. A *lot* of overkill, and way too expensive for this project, but... It's what I've got in the parts bin.
Two Light Sensitive resistors should allow it to waddle towards a light, or follow my children with a flashlight.
A small microphone will allow it to react to sound.
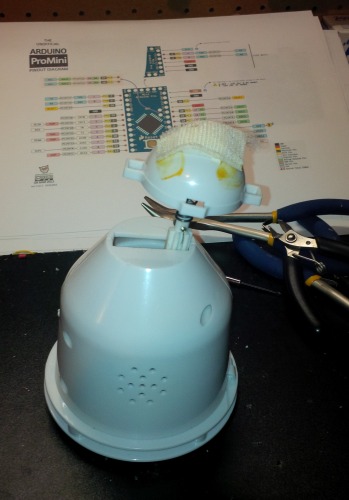
A micro servo to rock the body back and forth.
And a few strategically placed leds just for fun...
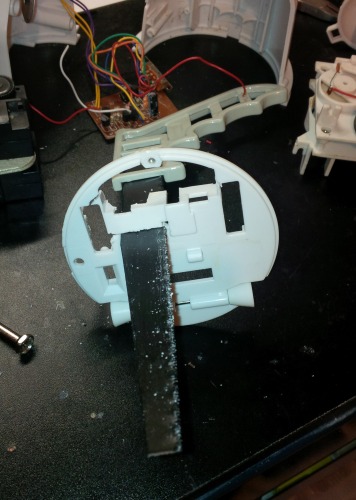

I had to cut the bottom plate to fit the new wheels through. I will likely have to file down the inside wheels of each set, as I'm sure there will be some odd tug-of-war when they are running in opposite directions..
Update: 12:30am wrapping up for the night. Have all electronics and mechanical completed. Tomorrow morning is assembly and upload of basic code.
And THIS is quite obviously the BIRD BRAIN
Wish me luck!
Update: 4:30pm Sunday afternoon
{kind=link}
Electronics and most of the mechanical is done. 90% of the coding is complete as well....
and most of the mechanical is done. 90% of the coding is complete as well....
My challenge to myself was to start from scratch at 6pm Friday night, and with a house full of kids, (my 7 year old son had two other boys over as well) and the wife gone for the weekend, complete this project by midnight tonight.
I actually believe I'm on track.

Update: 10:00pm Sunday night.
Ok, I'm exhausted. I've been at this hack for over 60hrs... Sleep calls... I can no longer see...
For what it's worth, the code to this point is here:
https://github.com/michaeljball/PenguinBot
I will finish it tomorrow...
Cheers.