



PAROVOZ: 6WD all-terrain robot platform
A long time ago (15 years to be precise) as an undergraduate I messed around in a robotics lab and even participated in a robotics competition in France. Te revive the sweet memories of my youth I recently decided to build a robot. My involvement with the robotics before has been on the programming side only, so I wanted to start with something relatively simple, yet functional enough to build my later projects upon.
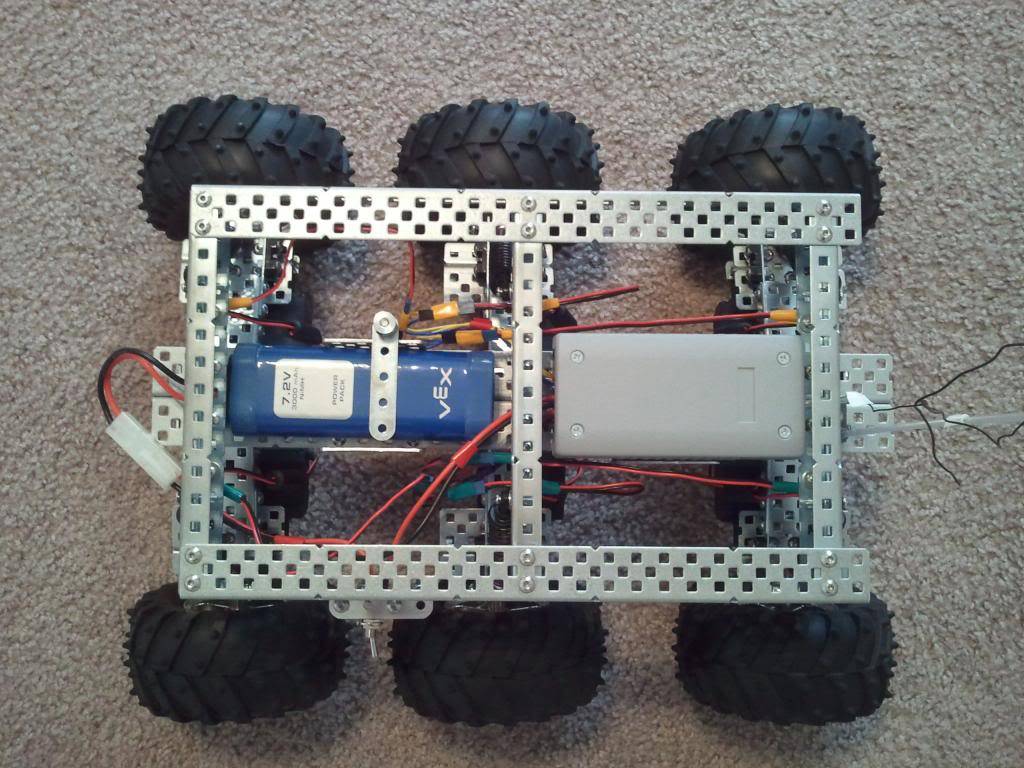
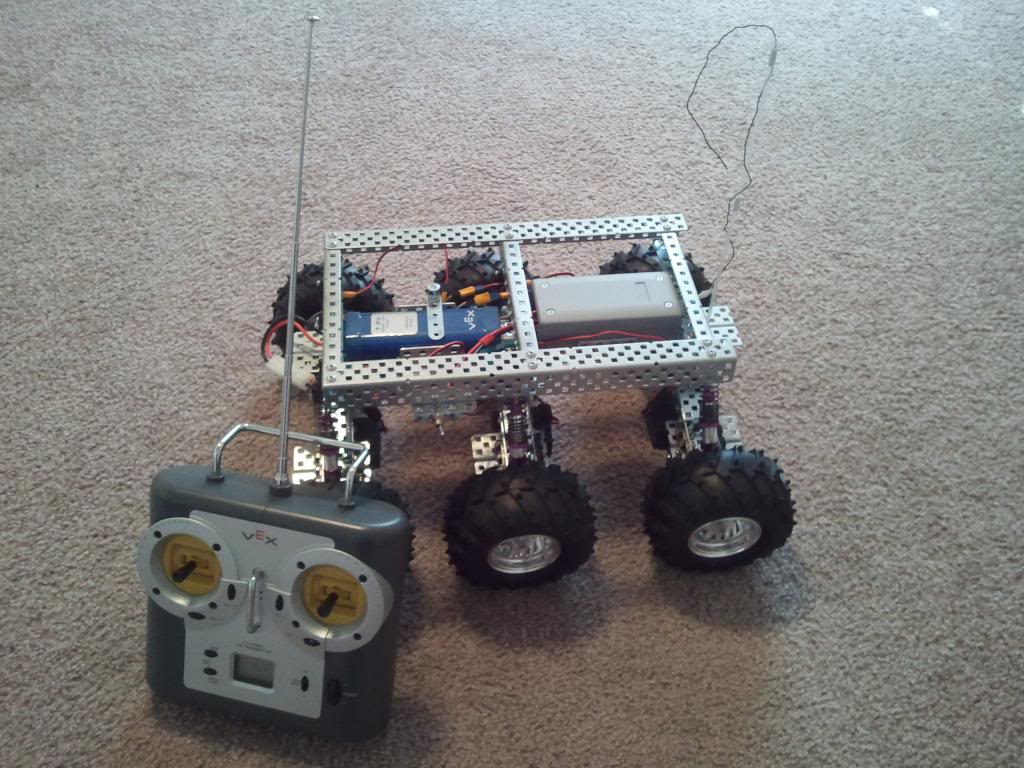
Thus, inspired greatly by Mr. Russell Cameron's 6 wheel design (https://www.robotshop.com/letsmakerobots/node/5155), I decided to come up with a 6WD all-terrain robotics platform of my own. Since I was completely new to building robots, an obvious choice was to go with some standard robotics components. After researching into various systems (Lego, Minds-I, Tetrix) I made a choice to use VEX components, due to their (relatively) modest pricing and high structural strength. I also use VEX 393 motors, 7.2V NiMH battery pack and a 75MHz FM 6-channel transmitter.
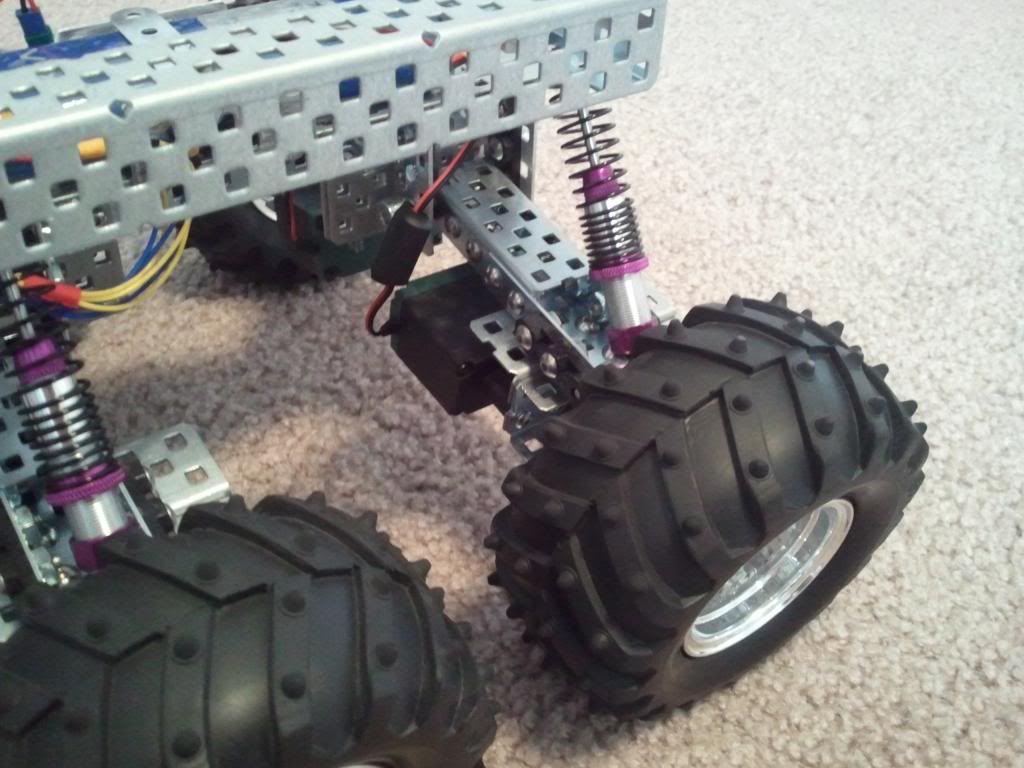
However, VEX system lacks a few components for an all-terrain chassis, namely the wheels and shock absorbers. So I used the Dagu Wild Thumper wheels
which come with hub adapters that fit perfectly on VEX 4mm square shafts. For the shocks absorbers I went with the 100mm shocks for large RC trucks
http://www.hobbyking.com/hobbyking/store/__22500__1_10_model_car_100mm_adjustable_aluminum_shock_absorber_2pc_.html
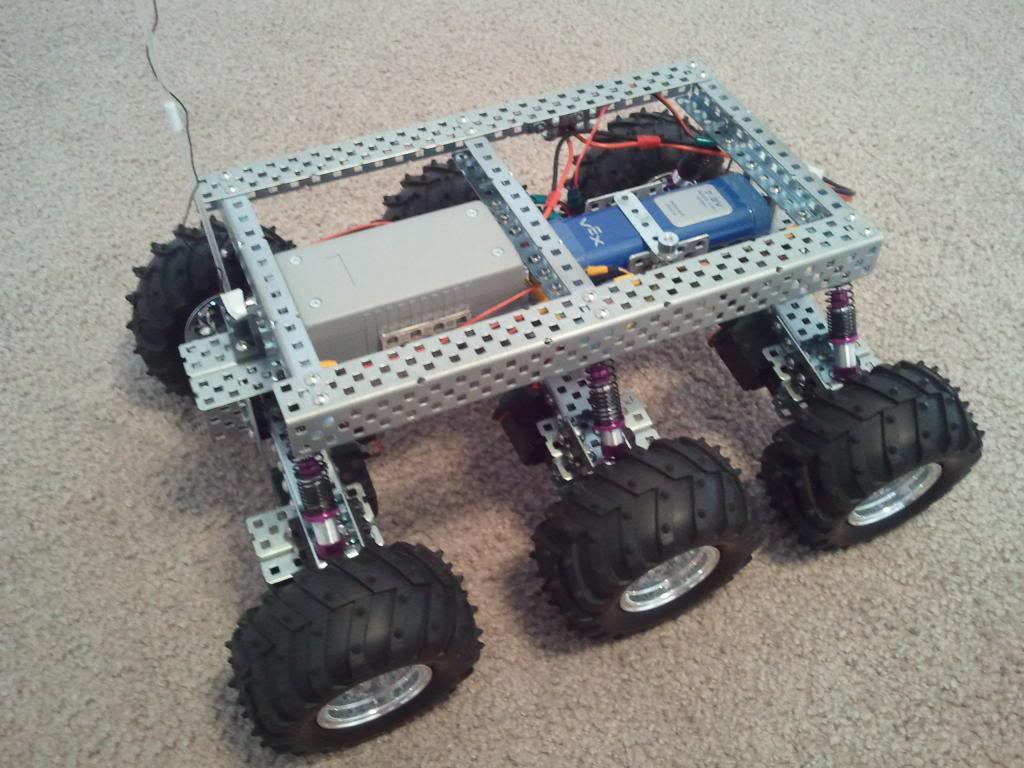
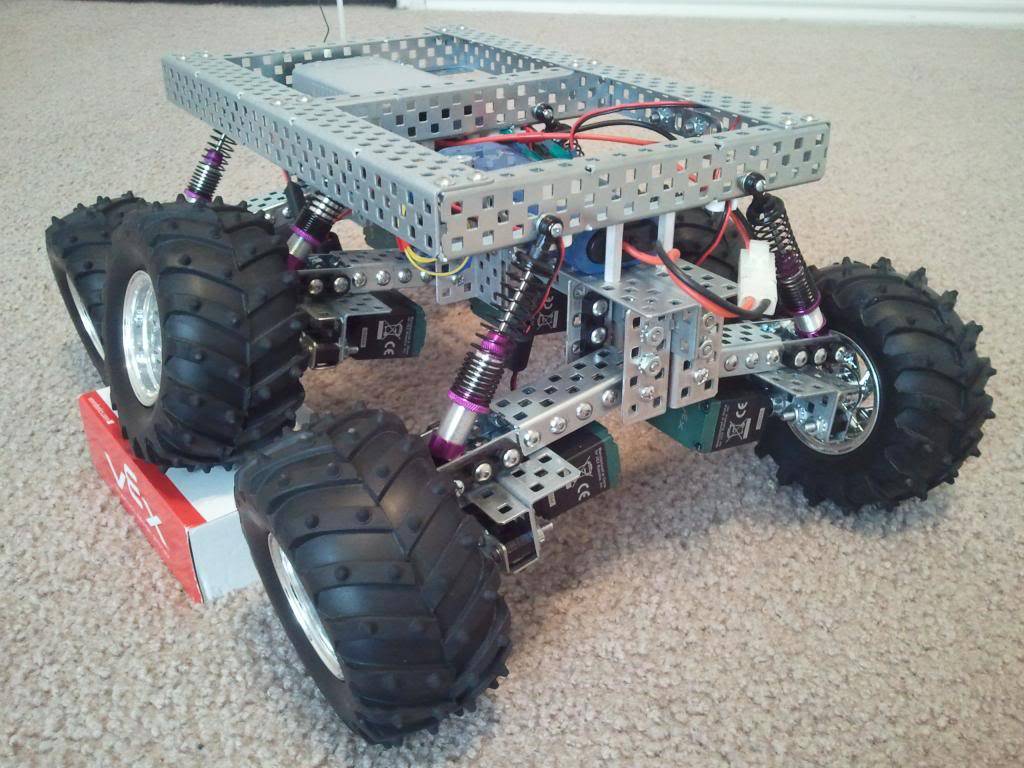
With all these components I designed and assembled a chassis with 6 independently suspended wheels, each driven by a separate VEX 393 motor. While I have a VEX PIC microcontroller, for now the platform is controlled via a simple custom electronic box that contains a Sabretooth 2x12 RC motor controller
http://www.dimensionengineering.com/products/sabertooth2x12rc
paired with a GWS 75Mhz FM receiver
http://www.gws.com.tw/english/product/receiver/r6n.htm
that appears to be perfectly compatible with VEX transmitter unit (with appropriately chosen crystals).
Now that the platform is complete, I am having lots of fun driving it around. The video shows some basic functionality and an indoor test drive. Note that the top of the frame is now open, but is it designed to be closed with two VEX plates, which creates a large flat space to mount any sort of on-board equipment. I think I might equip the platform with a robotic arm in the future.
If you like my design and are interested in building something similar, I will be happy to provide detailed instructions and more close-up shots of how the suspension works. Please don't judge my design too strictly, as it is the first robot that I ever build. I must say that going from the programming side to mechanical and electrical side has been a challenging but greatly satisfying experience.
Below are some pics of the robot:









Drives in rough terrain
- Actuators / output devices: 6 VEX 393 motors
- Control method: R/C 75MHz FM Futaba compatible
- CPU: Sabertooth 2x12 RC
- Power source: 7.2V NiMH 3000mAh
- Target environment: indoor, outdoor, rough terrain