



omocha
18.7.2010
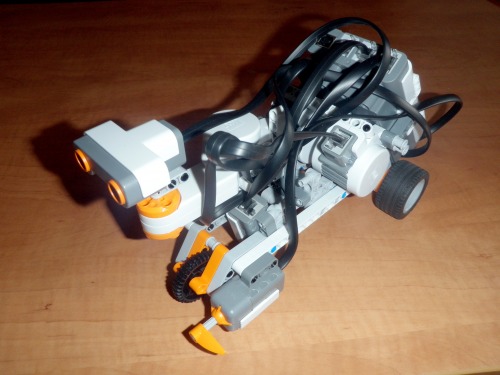
this is my new NXT project. the plan is to build the trike that would be able to attend ISTROBOT competition next year - line following with obstacle, tunnel, ramp, line gap (and maybe some other stuff as well). i decided to switch to NXC (as to NXT-G wasnt exactly my cup of coffee after my last arduino). so far i like it :))) i am using BRICXCC and i really like all the possibilities of debugging i havent even tried yet :)
the robot itself will probably change a bit over time (or maybe a lot...) this is just basic design with a lot of space for all the sensors, etc.
i uploaded 2 videos of the first line following test, one of them showing the whole track, the other trying to focus on the detail of color sensor.
TODO:
-> improve performance - speed, sharp turns
-> gap - distinguishe between gap and sharp turn, location of the line, etc.
-> obstacle detection and navgation around it
-> changes in light levels (tunnel, camera flash/lamp, etc)
7.9.2010
so, i changed the chassis layout completely. the previous one was nicer i guess, more inventie ;) but i was just too long for the course itself to manage on the steep turns, tunnel or ramp.

i changed the control from switch-case type to PID. i first had to alter the readings from the color sensor according to the fact that it can not only detect black or white on such a surface, but other colors as well, i write about it HERE, it may be quite usefull if you play with NXT2.
i also shot the video of the navigation using this new controller and larger wheels in this hw setup. it increased the speed a bit, added more robustness to the turns and especially consecutive sharp turns. the plan is to tune the PID parameters to enable robot to cruise at even higher speeds.
TODO:
-> gap - distinguishe between gap and sharp turn, location of the line, etc.
-> obstacle detection and navgation around it
-> changes in light levels (tunnel, camera flash/lamp, etc)
25.9.2010
omocha can now detect and pass obstacles of brick type (e.g. brick ;) ) it uses ultrasonic (US) rangefinder to detect it in front, then turns right and turns US left to watch its side and then simply moves in the arc path until it finds a line again. atached is a video of this movement.
for compensation of light levels i had to lower the light sensor, but i guess it will need some shading piece of paper in the final version. as to i usually program and tweak the robot during the night, it was quite SURPRISED to see the sunshine one day and was almost unable to follow the line :)
as for the gap part of the code, omocha s now able to detect the line (and only has problems in consecutive steep curves (r = 5cm)) and then stop. still have to add code for returing to where he lost the line and starting some search mechanism.
TODO:
-> gap - add search algorithm
-> changes in light levels (tunnel, camera flash/lamp, etc) - probably by some light shade
12.5.2012
work finished long time ago, i just noticed that the project was still open. it had to give way to other new builds.