


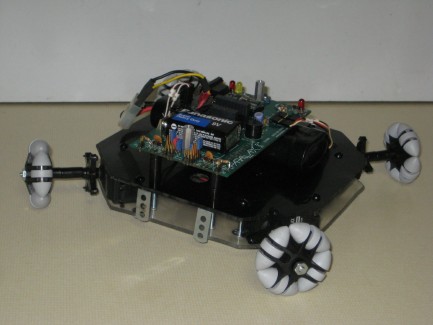
Omniwheel Growbot with Flexable Body addition
Here is the new addition to my Omniwheel Growbot. I constructed a body using 2 peices of plexaglass and sandwitched the servos inside. I used a peice of weather stripping on the top of the servo to resctict movement. It is easy to change angles and motor placements. It worked a little better then the circuit board prototype but still far from perfect. I tried on several types of floors. Wood panel, light carpet and concrete. I also changed the wheels to single wheels instead of double wheels. A little better. Then I increased the wheel base. A little better. I think I am as far as i can go with hard plastic wheels. They have no traction at all even in smooth surfaces. Sort of like driving a car on ice. I suggest anyone thinking about omniwheels, should forget about hard plastic wheels. Totally useless. Silicone coated or rubber seem to be the only way to go. I plan on trying the 3 wheel setup as a last atempt. The body is very easy to add or subtract and position servo motors as desired. Can always go back to regular wheels. lol Included are some pics and waiting for the videos to be approved. A picture speaks 1,000 words and you will soon see what I mean. It has been a learning experience for sure. Waiting of a stable robot before I start the programming. It now runs on a 10 direction subroutine.
Navigate with eventual R/C and infrared control
- Actuators / output devices: Four servos modified for continuous rotation
- CPU: Parallax Basic Stamp 2
- Operating system: windows XP
- Power source: 7.2 NiCad motors, 9v electronics
- Programming language: pbasic 2.5
- Target environment: indoor, where ever there is something to play on