


OmniBOT Arduino Based Three Omni Wheels Holomonic Movement Rover (Kiwi Steering)
Hi to all,
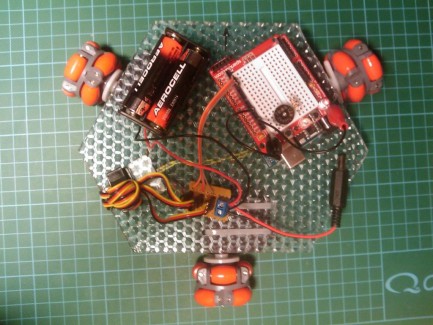
this is an Arduino based three omni wheels rover with 2DOF.
The 2DOF is accomplished by three omni wheels on a continuous rotation servo (modified) each in a 120 deg. angle.
The code was a little bit tricky but with good old trigonometry and physics it is done :)
The actual sketch can be found here: OmniBOT Arduino Sketch
(Yes it is in GREEK it doesn't just sound like it :) but the code is readable (english) )
A few more pictures can be found here : OmniBOT photos
Any thoughts, suggestions or comments are welcome !!
Thank you for your time.
Orfeus
p.s.
I am saying this is complete cause the main purpose of the project was the code.
Next will be a completed "sensore-ised" rover.
Holomonic Movement Kiwi Steering 2DOF
- Actuators / output devices: 3 HiTEC Servos (modified for continuous rotation)
- Control method: autonomous
- CPU: Arduino Duemilanove
- Operating system: Windows
- Power source: 3V5, 7V2
- Programming language: Arduino IDE 0019
- Sensors / input devices: none yet
- Target environment: indoor