


OFR (Object Following Robot)
I have been having this idea in my mind for awhile. Now I want to get it out and put it on the drawing board.
OFR is a robot that follows a specific infared siginal around and around where ever it goes!
I'll give updates on my progress
I have made an infared emmiter from some parts and it emmits a 38kHz. This will be what the robot will follow.
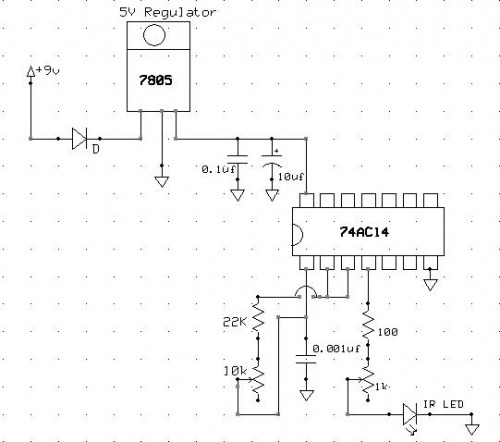
I have planned out the circut board that emmits a 38 kHz signal.
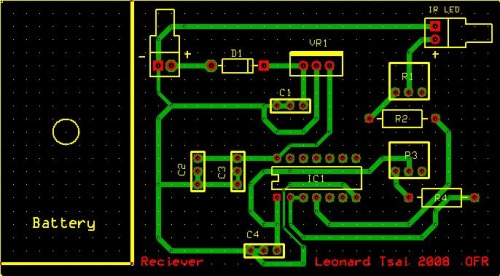
Also I have it designed in a PCB form.
The 7805 voltage regulator turn 9V to 5V enough for the chip to handle.
22k and the 10k varrible resistor helps the capacitor charge at different speeds.
The 74AC14 is an inverter chip.
th capacitor charges about 38,000 times per second and transfer it to the infared LED which generates a 38kHz signal
I'm waiting for my PICAXE kit to arrive.
in the meantime i'm having trouble solving how it's head is going to find, lock on, and follow the infared beam.
if anyone has an idea, feal free to tell me :)
Thanks to Chris the Carpenter, I decided to use the Pololu beacon transceiver.
I have recievied my PICAXE and instead of the pololu dual serial motor controller, I used the solarbotics L298 motor driver. I hooked it up to 2 motors and to the PICAXE. The PICAXE gives signals to the L298 motor driver and it drives themotors. Also indicating the direction through fashionable LEDs.=)
This is what I have so far.
I just finished the emmiter circut on a perf board.

Close uo of the components:
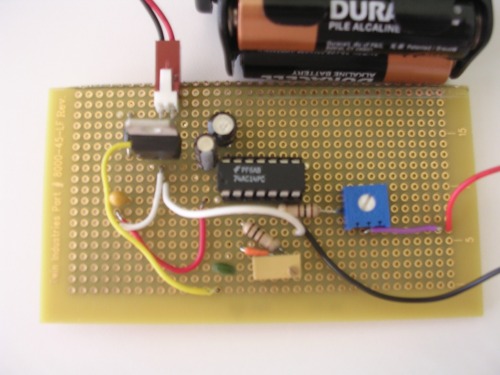
The Infared LED Looks great at 56kHz
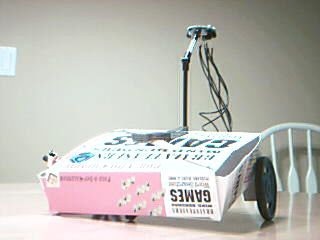
I finally finished the robot after many program problems.


yes the body is a puzzle calender. I stumbled upon it and thought it was really good!


This is in the engine. The PICAXE is wired to the motor driver really badly. I couldn't find good connectors, usually the soder would break and the wire would come off.

That is the Pololu Infared Beacon sitting at the top of some lego sticks.
Follow an Infared beam around
- Actuators / output devices: 2 motors
- Operating system: Picaxe 28x1
- Power source: 4 AA batteries
- Sensors / input devices: 56 Khz IR Detector
- Target environment: indoor