


Obstacle Detector Ultrasound
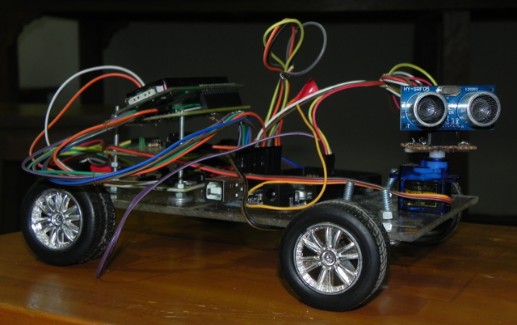
I call this robot Explorer :) This can decide its own path using SRF05 ultra sound sensor. Its primary path is going forward, but if it finds obstacle within 20cm distance, it checks right and left. By comparing the distance of the obstacles in both right and left (if present) it decides its path. A 16x2 LCD has been used to display the information about what the robot is doing. The brain of this robot is an Arduino Mega 2560, I know same thing could be done using the UNO or just the ATmega8. But just tried with the Mega :D To tell about the sensor, SRF05 is one of the best ultra sound sensors I've used so far, I meant comparing to SRF04 or whatever. This is a complete Arduino project, compiler was Arduino as well.
Navigate around via Ultrasound Sensors
- Power source: 9V Li-ion
- Programming language: C
- Sensors / input devices: SRF 05 Ultra Sound
- Target environment: indoor