


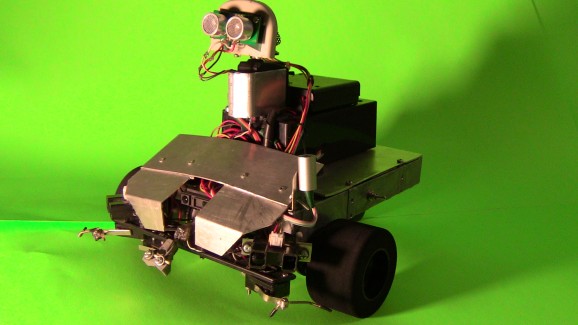
Obstacle Avoider
I figured I should start with the chassis on this project:)Built around an old computer drive on which I attached a pair of gearmotors (12v,200rpm).The (v battery pack fit in nice and flush within the case.Switches installed on the sides,drilled and tapped. Went with the Arduino micro(9v) again along with the Adafruit motor controller(Stacked chip for extra amps).Separated all the power sources.Sonar,infrared,bump,tilt switches.Servo turret(4.8v)Added a speaker and RGB LED for debugging this work in progress.Thanks for watching!
Wanders around the given floorspace.Avoidance using sonar,bump, tilt ,IR.. LDR for additional sensor
- Actuators / output devices: speaker, servo, 2 * 1:200 gears 12volt, RGB led.
- Control method: autonomous
- CPU: Arduino Duemilanove (328)
- Power source: 12v nimh for motors, 4.8volt for servo, 9volt lithium for Arduino
- Sensors / input devices: 3xSharp IR GP2D12, bumper switches, SRF 05 ultrasound, one LDR.
- Target environment: Indoors is best