



Object Avoidance 2 Wheeled Robot
Hello, this is my first project on letsmakerobots so bear with me :)
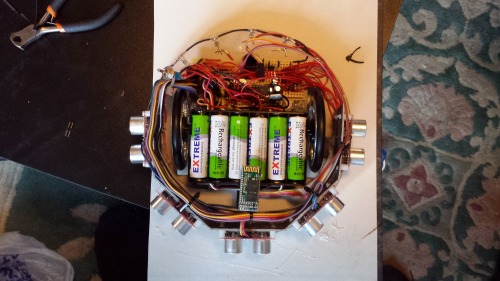
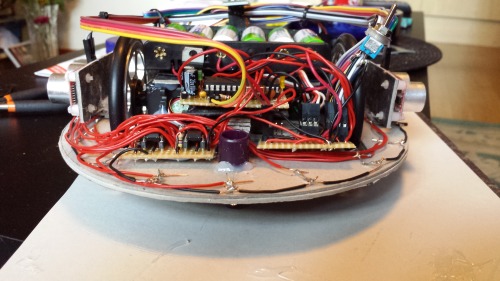
I wanted to build an object avoidance robot with more than one ultrasonic sensor as i found using one sensor very limited. By using 5 sensors gives this robot a 180 degrees field of view allowing continuous speed adjustments servos motors (limits of atmega328 chip and interference between multiple sensors pings limit this to 30ish times a second).
I made the robot from layered card and glue which was pressed under alot of weight, produced a light, strong, and easy to work with material. It also has 16 leds in the base, these are animated at 30fps, wanted something similar to the bio luminesence flickering effect you see on some jelly fish. Went with blue leds as i had some old led Xmas lights and it worked out cheaper than buying new ones.

The robot has 3 modes of operation controlled via a andoid bluetooth app I wrote.
You can control it manually via the app, selecting the 3rd button turns AI on and robot will move forward avoiding all objects and walls. In manual doing nothing for 5 seconds will put it in Object tracking mode until a command is sent.
Code could do with a bit of fine tuning to smooth out turning and maybe add some noise to logic to allow more varied path choice.
For my next robot i will most likely use motors with encoders and a compass and try to get the robot to do some basic room mapping and pathfinding.
Object avoidance via 5 ultrasound sensors, basic object tracking via same sensors, bluetooth remote control via android