



O-voider
Updated 9/6/09
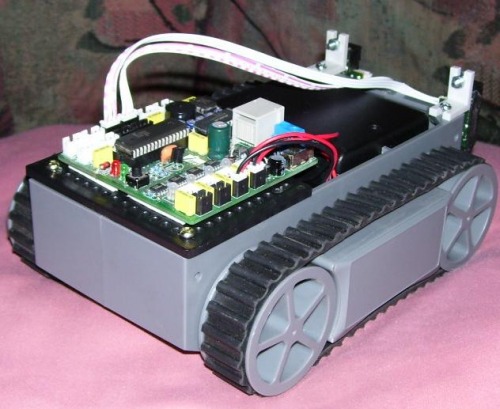
I got bored and built a simple object avoider robot that I'm gonna donate to my local high school robotics group.
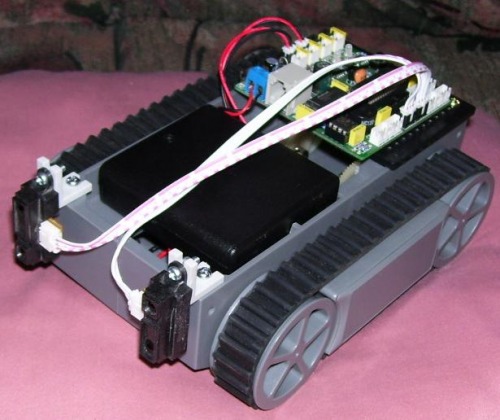
Its a Pololu tracked base, 2 Sharp ranging sensors, and a Inex controller.
I swapped the sensors to Sharp GP2D120's after these pictures were taken.
I also did the suggestions from the other LMR members by crossing the sensors. Then changed my code to use more of the sensors range, and maxed the robots speed.
Video 3 shows the improvements you guys suggested, which clearly improved its performance by a large degree.
The school kids are gonna love this robot.
Here's the new programming code:
to Go_Back
ab, setpower 8
a, thatway
b, thisway
ab, onfor 60
ab, off
wait 50
ab, setpower 8
ab, thisway
ab, onfor 73
ab, off
wait 50
end
to Forward
ab, setpower 8
a, thisway
b, thatway
ab, on
end
to Right
ab, off
wait 50
ab, setpower 8
ab, thisway
ab, onfor 60
end
to Left
ab, off
wait 50
ab, setpower 8
ab, thatway
ab, onfor 60
end
to start
loop [ if ((sensor 1) > 151
and ((sensor 3) > 151))
[ Go_Back ]
if ((sensor 1) > 151
and ((sensor 3) < 151))
[ Left ]
if ((sensor 1) < 151
and ((sensor 3) > 151))
[ Right ]
if ((sensor 1) < 150
and ((sensor 3) < 150))
[ Forward ] ]
end
autonomous object avoidance
- Control method: autonomous
- Power source: 4 AA batteries
- Programming language: Logo
- Sensors / input devices: Sharp IR
- Target environment: indoor