



"NV-DRD" Arduino-Based Object-Avoidance Bot
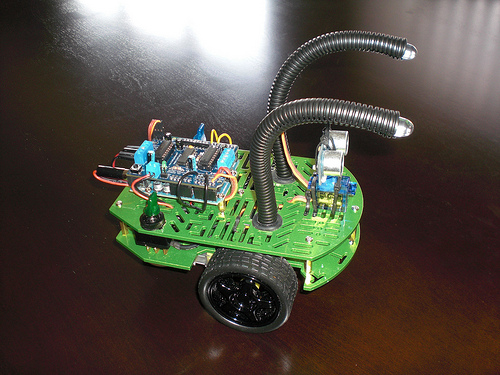
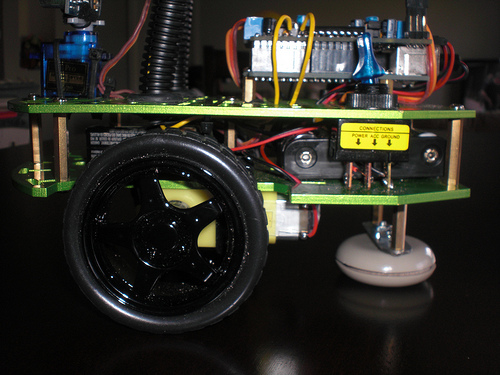
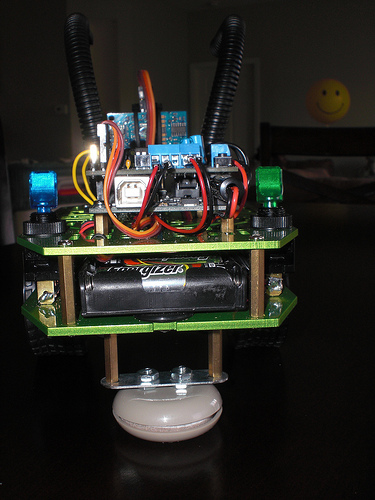
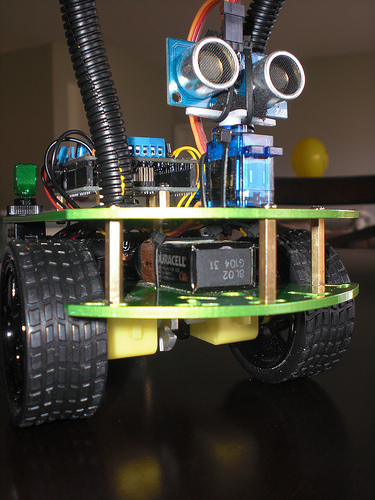
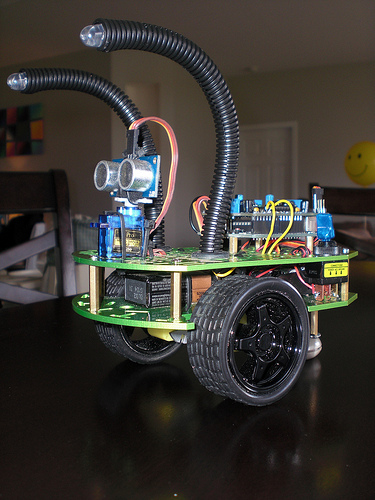
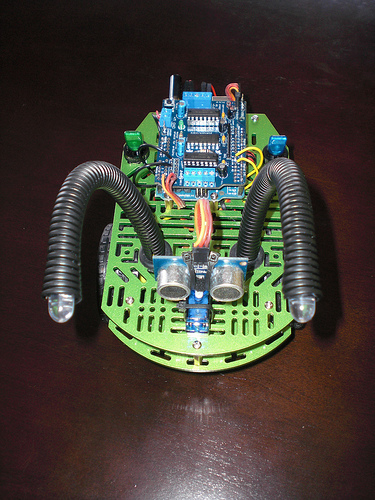
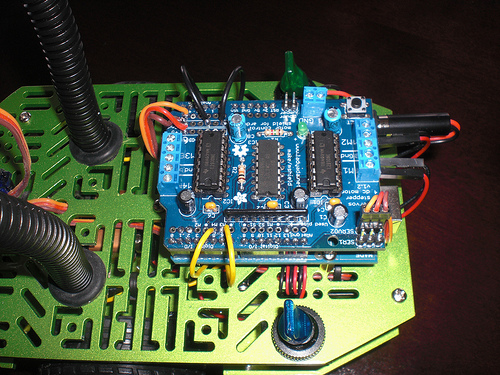
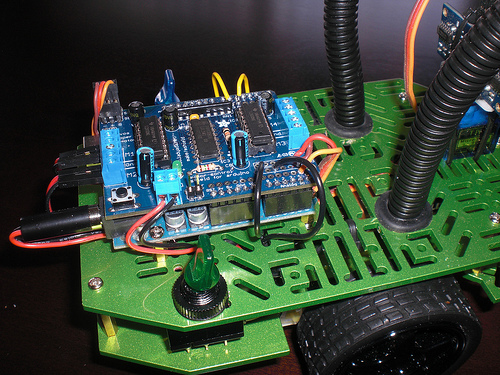
My bot's a pretty strightforward Arduino-based, two-wheeled, autonomous, ultrasonic avoidance bot. The chassis is the "Magician Chassis" from Sparkfun. I painted it a 2011 Dodge Charger color called "Green with Envy," hence the "NV" in the name. It's Arduino-based and the motor shield I'm using is Adafruit's. Its got two power supplies, each turned on by one of the two lighted switches on the top of the bot. Four AAs power the wheel motors (green switch) and one 9V for the circuitry, servo motor it uses to "turn its head," and the Paralax Ping))) sensor (the blue switch).
If you're a Farscape fan, the antennas might look familiar. I wanted to do something reminiscent of the "DRD" maintenence robots aboard Moya. I used some wire tubing, a couple of white, jumbo LEDs, some 18 gauge wire to provide some stiffness, and a couple of rubber grommets to hold them to the base. I may do something more to the end of the antennas, to give them a bit more of a finished look, but I'm pretty satisfied with the look for now.
Oh, the Magician Chassis came with a ball-and-socket caster for the rear of the bot, but I didn't like how it would drag through the carpet in my house and get stuck in the grout lines on the tile flooring, so I used a couple of plastic furniture "slider" casters instead. I simply drilled a couple holes in one, then flipped it over, stuck in a couple of small bolts, stuck it to another caster, then bolted them both to a small, holed peice of steel that in turn is attached to the same hardware that the ball-and-socket caster was.
My 1.0 code can be seen here (Processing, obviously): http://pastebin.com/6q0taukp
My current 2.0 alpha (but working!) code is here: http://pastebin.com/0tFCkAF0
Object-avoidance via ultrasound
- Actuators / output devices: one servo, Two DC motors
- CPU: arduino - atmega328
- Operating system: Arduino
- Power source: One 9V battery, Four AA
- Programming language: Processing
- Sensors / input devices: Ping))) sensor
- Target environment: indoor