


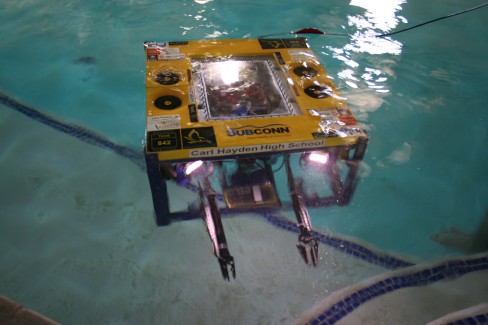
NURC National Underwater Robotics Challenge entry from Carl Hayden H.S.
Here is an ROV built for the National Underwater Robotics Challenge. This video clip shows the mission and then shows one of the teams, Carl hayden High School, Falcon Roboitics team's ROV, Amanda going through its mission at 4 x the speed. You can learn more about this competition at www.h2orobots.org
Students at the school spen three months designing and building this rov based on the legacy knowledge from the four years prior experience.for pictures of the construction
http://picasaweb.google.com/john.h.842/Amanda
Control system: Innovation FIRST used in FIRS Robotics, Operator Interface, Robot controller
Tether: Fiber optic using IFS Transceivers
Speed Controllers: Victor 884
Manipulators: Three Jaw Grabber-Seabotix and Parallel Grabber -Seabotix
Lights: LED cluster from Superbright LEDS
Cameras: LCA 7700 from Light Camera Action
Thrusters: 8-Seabotix SBT 150- four vertical, four horizontal, each produces 6.4lbs of thrust
Bouyancy: Syntactic Foam from Syntech
Frame: Pultruded Fibergalss from Creative Pultrusions
Connectors: Underwater tight connectors from Subconn
Cable joining compound: Scotchcast
{kind=link}
It is teleoperated from the surface while it goes under water
- Actuators / output devices: 8- seabotix Thrusters, 4 for vertical, 4 for horizontal
- Control method: Fiber Optic teleoperated
- CPU: IFI Control system
- Operating system: IFI
- Power source: 24 Volts Lipo, regulated to 12Volts
- Programming language: C
- Sensors / input devices: Teperature, depth, video
- Target environment: underwater, pool, lake, ocean