



Number One
Hi All,
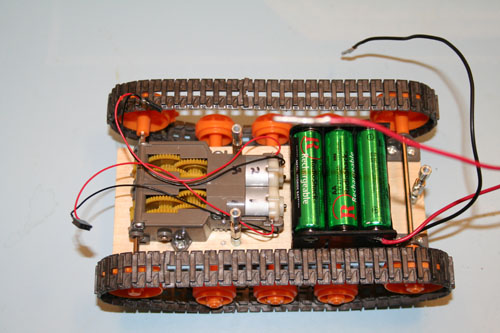
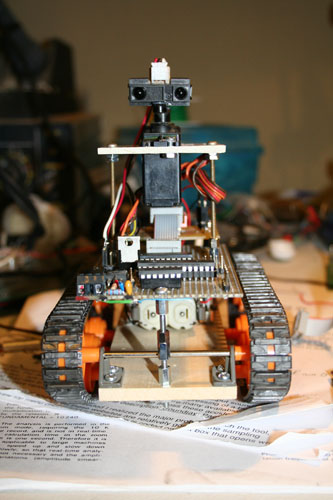
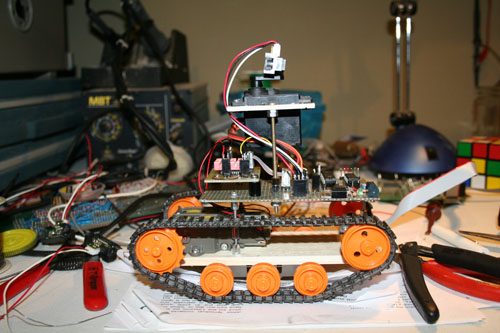
I just completed my first robot project. It's based on a dsPIC33FJ32MC202 DSP. I used the Tamiya track kit and dual motor gearbox for the vehicle base. A L298 bridge controller was used to control the motors and a Sharp GP2D12 mounted on a RC servo was used for ranging and navigation.
The Chassis:
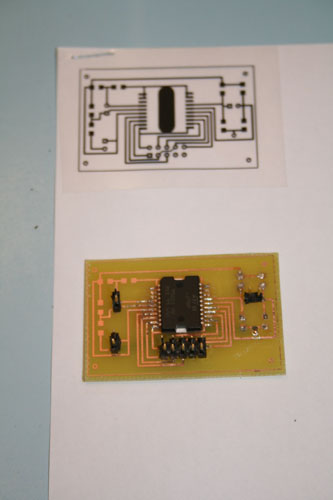
The Motor Controller Board:
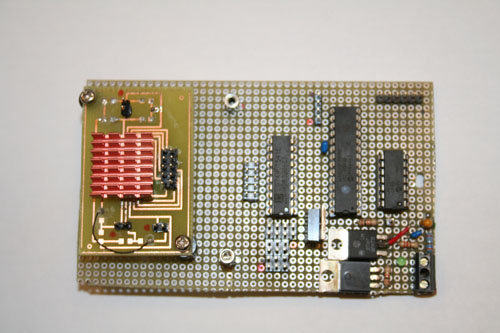
The dsPIC33FJ32MC202 DSP board:
Boards Mounted on Chassis:
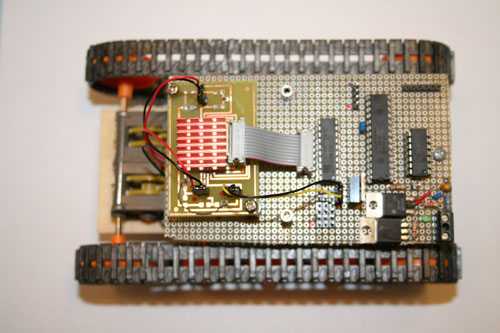
Completed Robot:
I'll post video as soon as I make one.
Navigate around via IR.
- Actuators / output devices: 2 geared motors, servo
- Control method: autonomous
- CPU: dsPIC33FJ32MC202
- Power source: 7.2V
- Programming language: C
- Sensors / input devices: Sharp IR GP2D12
- Target environment: Indoor/Lab