



Norris Mk1

I am a 1st year civil engineering student, but my main hobby is robotics, electronics - if it can be built, I want to have a go!
I've built robots for many years now, photovores and light followers and RC car hacks and the like, but in April I got hold of a picaxe 08M and some servos and I've never looked back!
Several robots later, a couple of hexapods, a quad, a wheeled platform and others, I've been playing with bipeds, and this was the first.
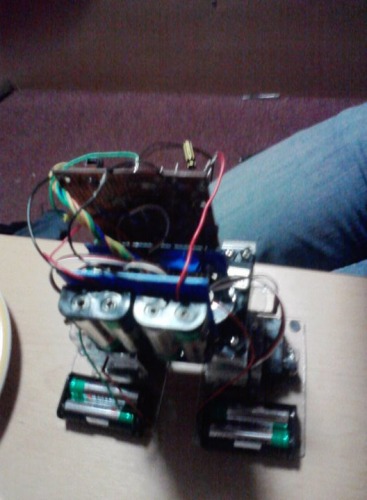
His name is Norris, he's running on a picaxe 20X2, with 4 servos driving his legs.
He has a very basic gait - tilts both ankles which lifts him up on one foot, rotates both hips to move the other foot forward and tilts the ankles the other way to continue the walk. He turns by lifting one foot, and only turning one hip before tilting the other way.
He was built out of perspex pieces from another biped which came to university with me, which explains his slightly wobbly appearance (I had nothing else nearby to make him from), and a few weeks ago, while travelling home for Christmas, I dropped the bag he was in - no chance of rebuilding :'(
But then I got hold of some aluminium sheet and a SD-21 servo controller board, so stay tuned for Norris Mk2, bigger, better, cleverer and stronger!
Thanks for reading!
Walks
- Actuators / output devices: 4 servos
- CPU: Picaxe 20x2
- Power source: 4xAA for motors, 4xAA NiMH for logic
- Programming language: Picaxe basic
- Sensors / input devices: none
- Target environment: indoor