



Noodlebot
Noodlebot main components:
- Satay veg with tofu
- Arduino Nano v3
- EasyVR 2.0 voice recognition module
- 4 x MG90 Micro Servos
- Ultrasonic Module HC-SR04
- 8x8 LED matrix KEM-7088
- MAX7219 Display Driver
- Garan Audio Module
- 2GB Micro SD
- HC-SR501 IR Sensor
- 2 x ball switches
- 7.4V 1000mAh 20C 2S Lipo Battery
- U-BEC 3A 5/6V
- Mini White 3.5mm Pillow Speaker
- Low Voltage Lipo Monitor
So originally the plan was to make a classic BoB... but then saw FrankenBoB by RobotFreak and loved the mouth addition (& zombie arms) so was stockpiling parts to make a replica.. but in the end couldn't be bothered creating a body so just pulled an old noodlebox out of the bin and noodlebot was born!
Noodlebot v1 (with red mouth) was created a while back and has no voice recognition capabilities.. he can read out a few questions to pretend, but then answers after a set delay with some default phrase. He also uses a cheap hacked mp3 player for speech (pretty much as per http://www.instructables.com/id/MP3-Interface-for-Arduino-Cheap-and-Easy/) - but a problem with this was that if powered down during speaking, the track position is rembembered on powerup and all your 'next track' pulse numbers are thrown out of whack.
Noodlebot v2 with a blue mouth uses the Easyvr 2.0 module from Tigal for voice recognition ability, and a Garan Audio Module (now discontinued) for pre-recorded mp3 voice phrases.
The code for walking in both versions is based on TED the BiPed by Protowrxs - includes a nice frame-by-frame to establish walking gait and splits each servo Moveto into a number of substeps.. excellent for controlling overall speed of motion and swapping to different walk-modes on the fly. Currently the incremental servo movement values in each substep are recalculated at each substep, giving a fast start and slow end motion, which i think helps with balance (it definitely does for the 'stand on one leg' action). A tip for anyone who also might use the code as a base - good idea to force a shorter timeout value for the HC-SR04 module - as, since we take a reading after each substep any timeout will cause a jitter in the walking motion.
Ran into an issue with both the EasyVR & Garan audio module both using SoftwareSerial.h which i didn't know disables some of the interrupts used by Servo.h.... resulting in twitchy servos whenever softwareserial would send a command. Current workaround is to detach servos any time he's sitting waiting for the trigger word and during any conversation, and then reattach just prior to walking/dancing etc.
Voice files were generated using web-interface TTS engine at http://www.oddcast.com/home/demos/tts/tts_example.php - then run through a few filters in Audacity to roboticise.
V2 also uses a 1000mAh LiPo instead of the original 5xNiMh - meaning instead of struggling with extracting & replacing batteries he can be recharged through the balance port under his bumflap. He also has a low voltage LiPo alarm with indicator LEDs, but i pulled the annoyingly loud buzzer off and instead he just starts whinging and complaining to be plugged in once low voltage level state is detected.
BUILD PICS:

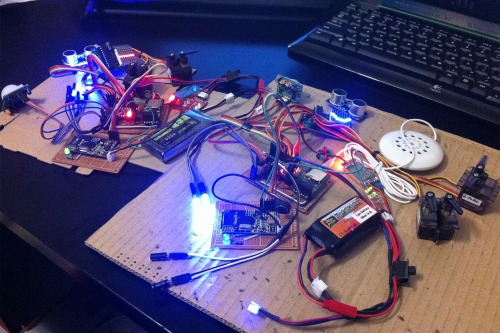
[components - except smaller 1000mAh battery used in final]
[giving first one away, so made a clone to keep]
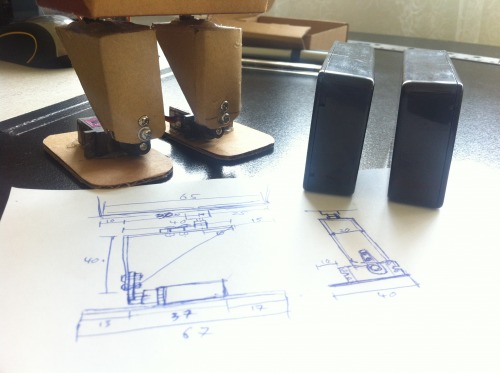
[new leg design using chopped corners from abs project cases for improved strength.. v1 had all cardboard design which later need reinforcing]
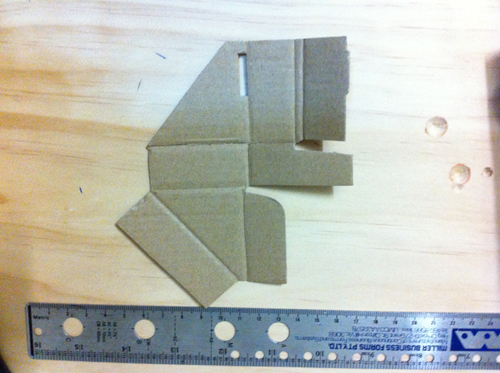
[cardboard cover for legs - just the corner from a mailer style box]

[rear cutouts]
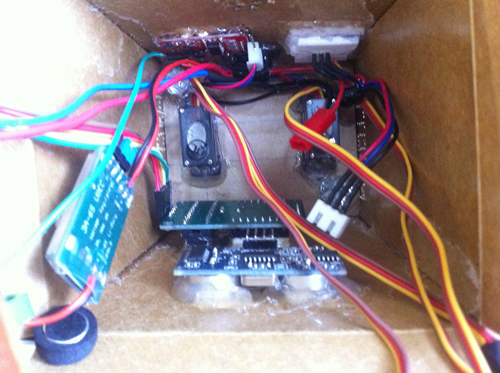
[some parts hot-glued in]
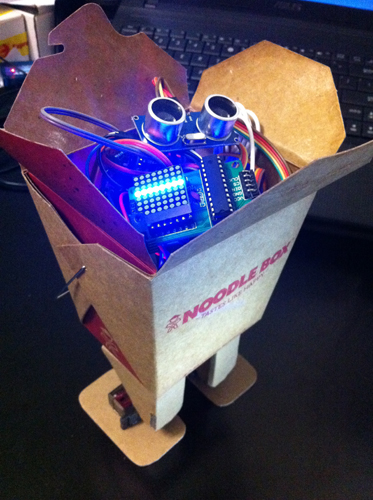
[everything stuffed in to run first balance test of walk code]

v2 + v1 + v2 clone
Walks, talks, dances. interacts with user through voice recognition - tells terrible jokes