


Nippon - Line Follower
Hello everyone!
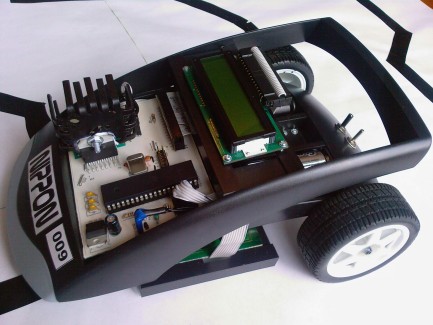
This is my first LMR construction, it is also my first "pro" linefollower and it was prepared for SumoChallenge2009 in Poland. My girlfriend called him "Nippon" - don't ask me why :)
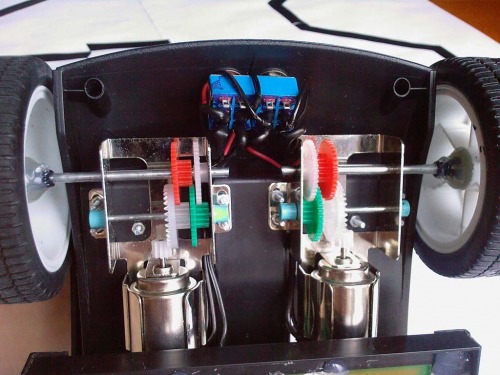
Engines' nominal voltage is 3V - I switched them directly to 6V, used PWM=254 but they were still too slow... So changing engines is my priority at the next update.
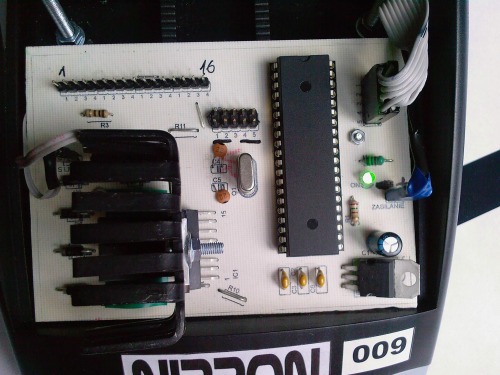
I made PCBs by myself - standard technique using iron, "smooth" paper and B327. I used special paint for soldermask, dedicated for glass (known in Poland as EnSold).
Top side:
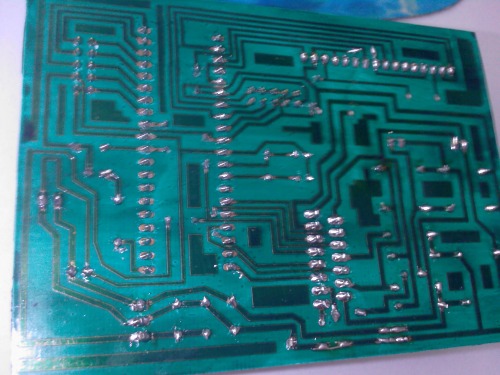
Bottom side:

An idea for chasis was born, when I was cleaning my room - it's not a toy-car or other space ship; I used... an old CD-rack :)
LCD is mounted only for sensors' calibration - Nippon is too heavy with it.
Here are some photos - enjoy :)
Old, boring CD-rack:

Whoah! All parts fit perfectly!

Sensors' PCB and batteries mounted:

Mainboard and LCD mounted:

Radiator for L298 added (engines use about 0,8A each)
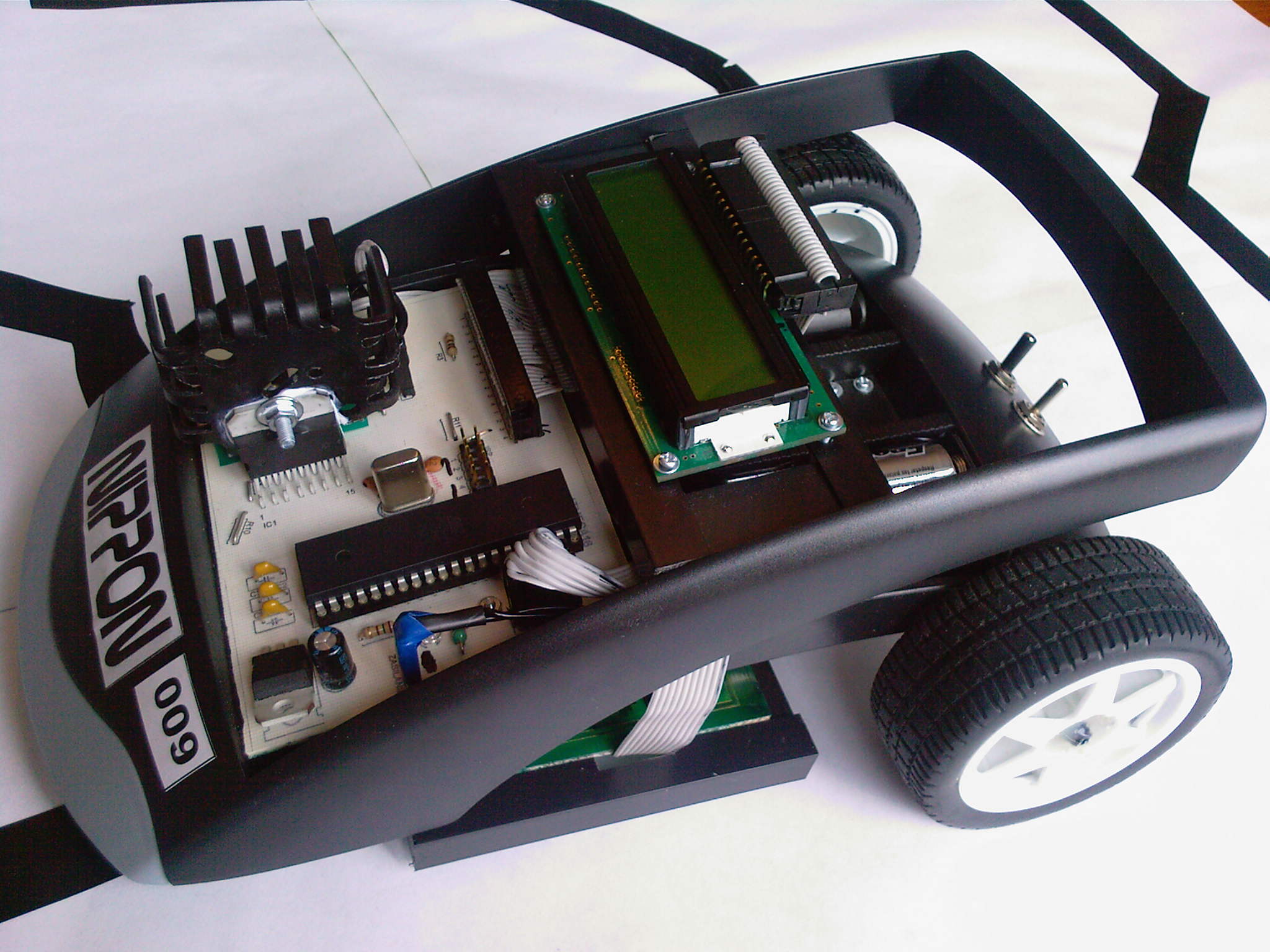
Almost ready to rock ;)



First tests of electronics attached to Nippon - everything works fine!
Mechanics:
More on my website: Robot kategorii Linefollower - Nippon
Follows the line ;)
- Actuators / output devices: about 60:1 AVT gears (need to be changed - they are too slow!)
- CPU: Atmega16 14MHz
- Power source: 4x AA 1.5V cells
- Programming language: Bascom (Basic for AVR) with some asm
- Sensors / input devices: tcrt5000 (reflex. transoptors)
- Target environment: indoor flat surfaces