


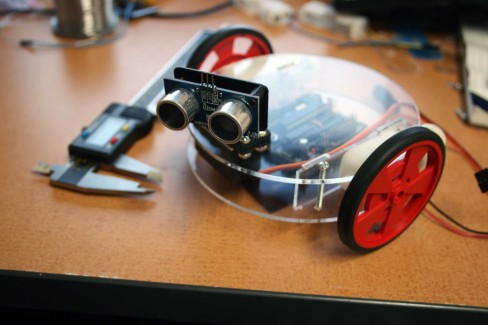
New laser cut robot chassis for GM series motors
Well, I got busy tonight and designed a chassis for the GM series of motors. The GM motors are really tops with price/performance... at $5.50 each, they are VERY hard to beat.
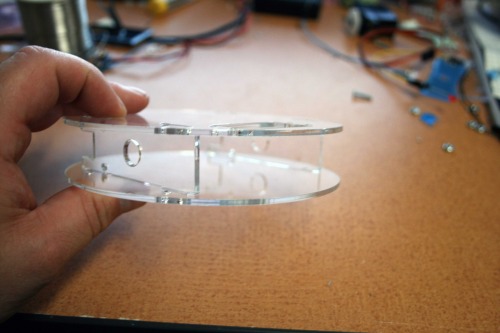
I thought you might like to see a video of the chassis being cut out, so it's included. The material is plexi .093 thick - it's clear, but has a blue protective plastic coating designed to protect it durring cutting and handeling - plexi scratches easily.
I designed this because there are absolutely no good chassis for the GM series motors, and that's a shame because they are so nice.
I've got to mount a few more parts, but it should be done over the weekend. Thanx to Fritz for sending me some code to build on :-)
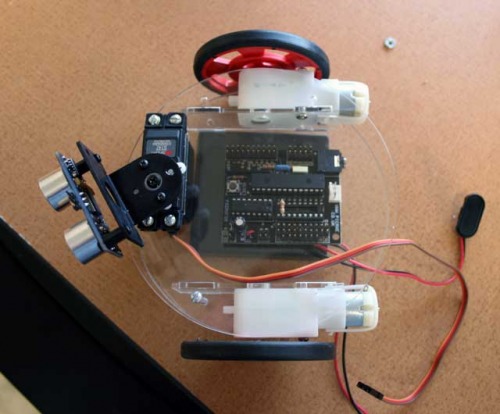
Everything has a solid mounting point on the chassis (screws) and the servo is a fuill size JR ST47, mounted off center so the shaft is centerline preventing cone errors durring scanning.
I started out as a machinist so I try to make everything with extremely close fitting tolerances and built to last - the deck is screwed together, but the interlocking tabs would hold it together by friction alone. Motors are hard point mounted with screws and add to the rigidity of the chassis.
Just a few more tweaks and I gotta figure out the battery configuration...



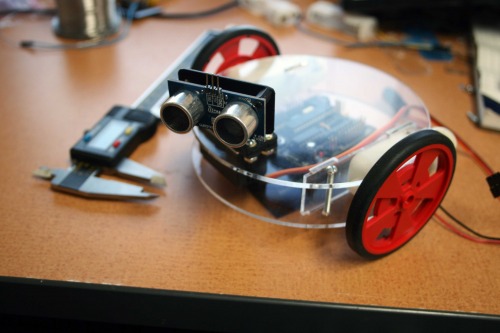
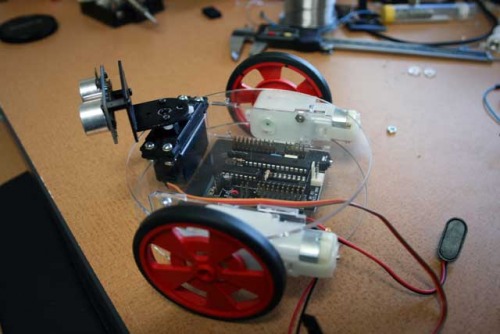
test bed for GM motors - currently sonar / avoidance
- Actuators / output devices: GM9 motors (pair) JR ST47 servo
- Control method: autonomous
- CPU: Picaxe 28x1
- Power source: 6V
- Programming language: Picaxe basic
- Sensors / input devices: SRF05 Ultra Sound
- Target environment: hard surfaces