



Neurono
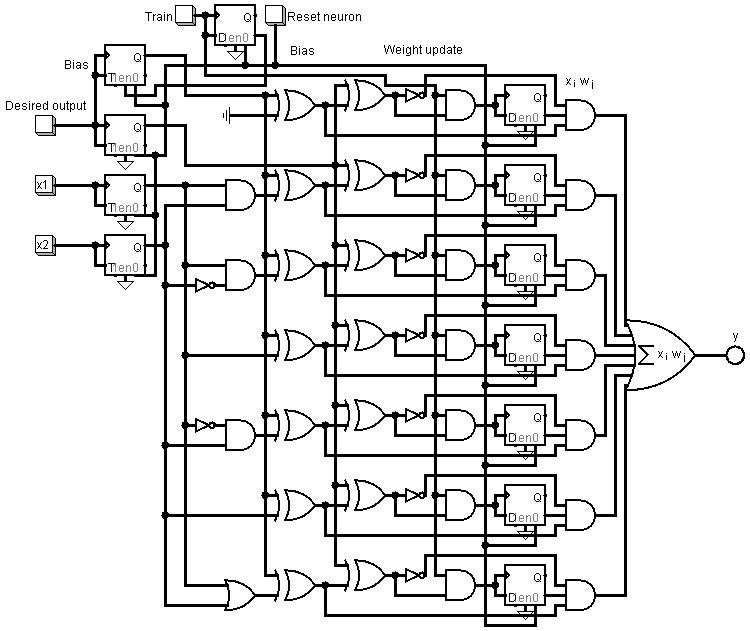
I am currently developing an new robot - Neurono. The robot will be controlled by a custom build neural computer. The computer consists beside of some sensor/actor peripherals of two artificial neurons I have recently invented and described in my blog here. Each neuron represents one brain hemisphere and controlls one motor.The schematic of one neuron looks as follows and is entirely built with logic gates (for the logic) and D flip-flops (for the memory). For the peripherals I am using Schmitt-Triggers (for input debouncing), mono-flops (timer) beside of some discrete components.
Neurono has no program it is executing. It is entirely taught what to do by supervised machine learning. The significant difference to a programmed robot is, that it has no pre-determinated behavior. It is only taught what is necessary to survive in its environment (or not if you're a bad teacher). The rest the robot will figure out by itself using linear classification based on the training examples.
Each of the two neurons can be individually taugh. The PCB layout of the neural computer is still in an early stage, just showing the teacher input unit with debouncing circuitry:

I will continue my work on this after my holiday in Malaysia where I will heading to tomorrow noon time with my family.
Learning