


NanoSeeker
NanoSeeker is a very small, autonomous underwater vehicle.
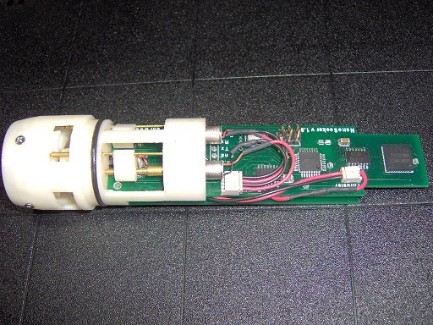
Almost all of the structural parts were 3D printed on a Dimension uPrint, including the propeller. It has:
- AVR ATmega328 microcontroller
- Bluetooth module as a serial port
- Honeywell HMC6343 i2c 3-axis compass, with integrated 3-axis accelerometer
- Provisions for a very small, SPI pressure sensor (not installed at this time)
- Custom made linear actuators for dive plane and rudder, using pager gearmotors
- 2 Lipo batteries wired in series (7.4 volts)
- Magnetic on/off switch
I've ordered a new tube for it, in clear acrylic, so it should look pretty cool once that is done.
I built an early version of this sub before I had a 3D printer, but it didn't work out very well...
Here's what some of the parts look like, hot out of the printer:
The dark globby stuff is support material from the printer, which dissolves away when you soak it in a special solution.