


Nano Sumo (Mechanical)
This is our Nano-Sumo robot. I say "our" because it is a team effort between Patrick McCabe and myself. Here is the link to Patrick's Electronics post. We talked a while and decided to create a bot based upon a team effort. The Nano-Sumo idea was used as it was small... yeah, very small, and we wanted a good challenge since it was a team effort.
I started the mechanical design back in July. It was decided that I will do the design and build 2-identical Nano-Sumo bots. Patrick was to create the electronics and we would send the parts to each other for the final assembly. I am just posting the mechanical part and you can see Patrick's Nano-Sumo post for the electronics and the completed robot video.
The Nano-Sumo rules are for a 25mm x 25mm size robot. I looked around for a while and the only gearbox I could find that would fit my working envelope was the SolarBotics #GM-15. Check the datasheet for all the details.
Here is what you get. 6.0mm diameter x 20mm length planetary gearbox with a pager motor. The output shaft is made for a drive belt. The motor's output shaft comes out on each side of the robot gearbox holder.

This photo below shows the 2-Nano-Sumo bots exploded. The black part holds the gearboxes and wheels. The rubber o-rings are the tires. They are 12mm diameter x 1.5mm cross section. The axles ride in the brass bushings and are retained by E-type retainer rings. Everything is held together by #2-56 flat head screws.
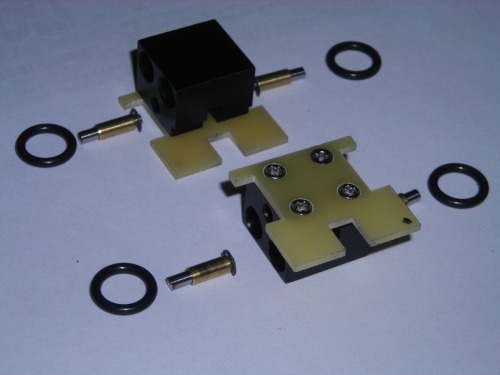
The wheels are machined from aluminum with the drive belt grooves also machined as one piece. Axles are 2.39mm diameter steel.

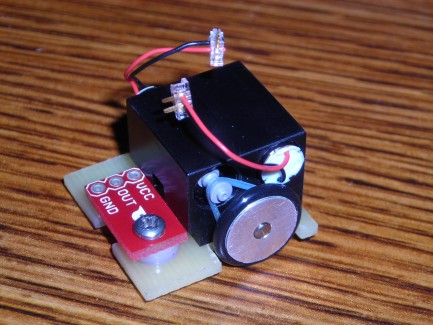
So here is the completed mechanical Nano-Sumo bot .
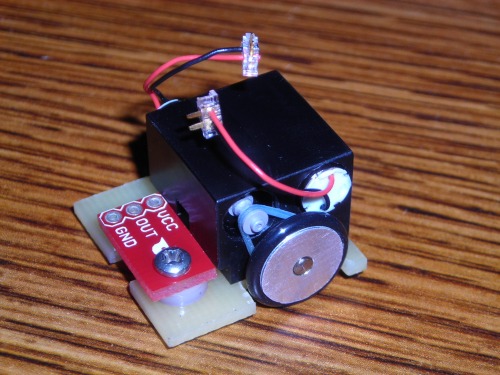
As I said earlier in this post, see Patrick McCabe's post of the Nano-Sumo for a complete description af all the electronic components and a video.
Thanks for looking at our Nano-Sumo robot!
Eliminates the opponent inside the Nano-Sumo ring
- Actuators / output devices: 2x Solarbotics #GM-15 Motor/Planetary Gearbox
- Control method: autonomous
- CPU: ATmega 328 Surface Mount
- Power source: 1x Li-Po 3.7 vdc 50mAh 20C rechargeable battery
- Programming language: Arduino
- Sensors / input devices: Solarbotics Bitty-Bot IR proximity Sensors #40250, SparkFun Line Sensor #ROB-09453
- Target environment: Inside the 19.25cm Ring