



MyzharBot - Open Tracked Robot
I love the Robotics since I was a young boy: "Mom, when I'm BIG I will create a robot that washes the floor, washes the clothes and irons them for you".
... the "MyzharBot Project"
MyzharBot will be your personal robot. You will be able to speak to it and it will recognize you and it will reply to your vocal commands.
MyzharBot will be a full autonomous robot, but you will be able to control/monitor it by your smartphone/tablet (Android, iOS and Windows) via WiFi, bluetooth and remotely by Internet.
Main Features
- Brain: Pandaboard ES, dualcore ARM Cortex-9 miniPC
- Operating System: Embedded Linux Ubuntu based
- Power: LiIon 5000mA Turnigy Battery
- Motors: 2x powerful Micro Motors series e192 – model e192-12-18 - Link - Datasheet
- Motor Encoders: 2x CUI INC AMT102-V - Link - Datasheet
- Motor Logic Unit: Robocontroller V2 - Link
- Motor Power Unit: Roboponte-MD V2 - Link
- Tracks: 2x Tracks LynxMotion 3″ width - Link
- Chassis: Laser cut plastic chassis. Project on Ponoko site
Project State
MyzharBot's prototype is actually under developing. You can see a few of videos made during preliminar tests on Myzhar's channel on YouTube.
The chassis is defined and a first project is ready, but a few modifications must be studied to let it be more robust and let the hardware be well suited.
A lot of work must be done on the software side. Linux system must be configurated and MyzharBot software must evolve such to include Artificial Intelligence. The software framework will be based on ROS, a Robotic Framework developed by WillowGarage.
Computer Vision processing will be based on OpenCV library, the most complete and performat Computer Vision Library available. I love it!
The Control Unit (GUI) is ready for Desktop PC and must be ported to mobile platforms.
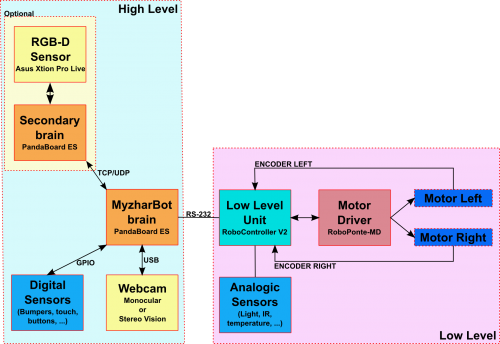
A draft scheme of the architecture:
One encoder suited on the motor shaft:

The brain, Pandaboard ES: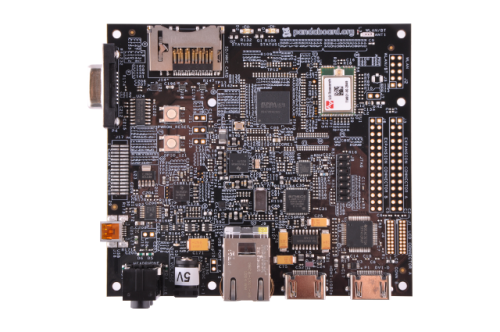
MyzharBot will be an autonomous robot with Computer Vision capabilities. It will be able to follow roads, persons, object and so on
- Actuators / output devices: 2x powerful Micro Motors series e192 – model e192-12-18
- Control method: autonomous, remote guide with smartphone (Android, iOS)
- CPU: dualcore ARM Cortex-9 miniPC
- Operating system: Embedded Linux (Ubuntu server)
- Power source: LiIon 5000mA Turnigy Battery
- Programming language: C++, OpenCV, Qt
- Sensors / input devices: Rotary encoders, HD webcam
- Target environment: indoor, outdoor