


my very First bot - eYandron1
My very first encounter with electronics - a very simple manually controlled robot.
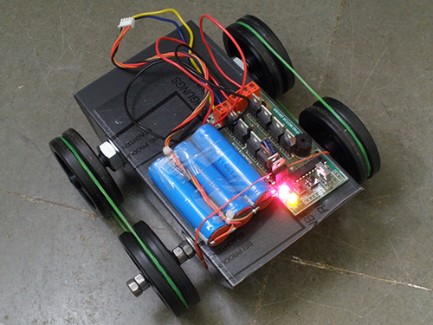
The main brain controlling it is a Attiny2313 + a motor driver board based on TIP122 transistors. At the time when I built this, I had no idea about a chip called L293D!
It uses two DC geared motors, uses a differential drive (to keep it simple, I made a trackbelt using rubberbands :D).
Right now accepts only 4 commands via IR (forward,back,left & right). Planning to get an IR RC5 decoder chip to expand its functionality (or make it compatible with more remotes)
Other thoughts: On the hunt for rubber.. for a better track belt.
Buzzes around by manual remote control
- Actuators / output devices: 2 geared motors 12V
- Control method: Infra Red
- CPU: ATtiny2313
- Target environment: indoor