


MY "Start Here" Robot...
I thought I should make a "Start Here" robot, so I did!
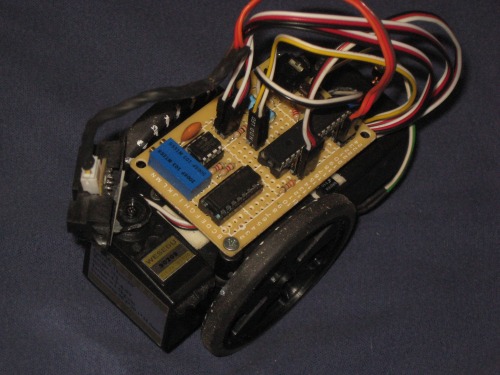
When I built the control board, I included an EEPROM, IR remote, 2 trimmer pots and wired the motor driver to the PWM outputs so I should have quite a bit of room in terms of code-play. To be honest, I have no idea what I am going to have it do, but again, all options are open with what I included on the board. For now, just a simple slide/spin code to drive around.
Pictures:
Whatever I want it to
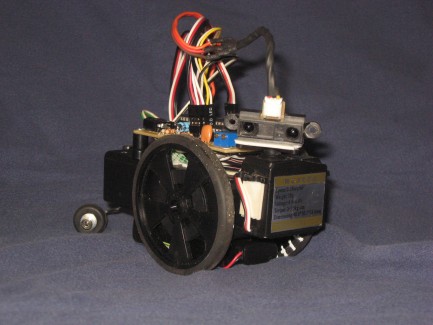
- Actuators / output devices: 2 GM3's
- Control method: All by itself
- CPU: Picaxe 28x1
- Operating system: windows XP
- Power source: 3 AA's
- Programming language: Basic
- Sensors / input devices: IR Remote Control, 2 whell encoders, 2 trimmer pots, 1 Sharp sensor