



My Robot Development Platform (currently adaptive mapping)
hi,
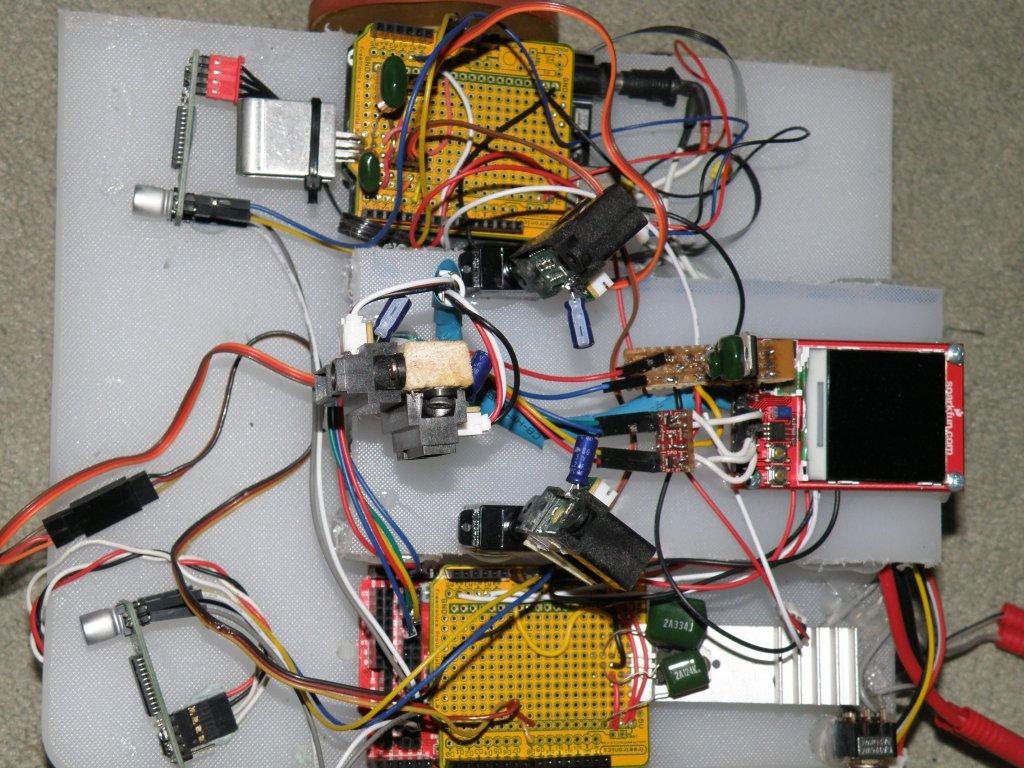
i have made my first basic robot,
parts
3s 5000 Lipo
2 stepper motors from a printer
2 easydrivers
seeduino mega
arduino demuliove
eeprom 256kbit
3 ditigal servos
2 sharp ir 20-150
2 sharp ir 10-80
nokia lcd 6100
my robot does a simple parthfinding then displays the map on the screen, this is using a pre definded goal reletive to the start location. it will save the map onto the ext eeprom

i am treating this as done, but i am planning to try to do SLAM
Pathfinding
- Actuators / output devices: stepper motor
- Control method: autonomous
- CPU: Arduino
- Power source: 3s 5000 lipo
- Sensors / input devices: Sharp IR
- Target environment: indoor