


My Mouse Is Running Away!
When, Why, What:
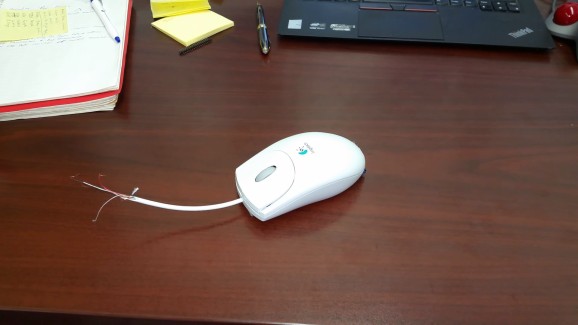
I work for an IT management company and am always looking for cool little ways to show off my engineering talents. I came up with the idea for this bot after purchasing a lot of cheap mini geared motors from eBay and tried to find something to do with them. I don’t have 3D printer handy so finding lightweight easy to tool plastics is sometimes difficult. I ended up coming across a box of old PS2 mice laying around and the ideas started flowing. I started looking online for different mouse bots but most seemed to draw attention to the fact that the mouse was modified. My idea was to make this little guy look like a normal mouse laying around. More importantly a mouse that got so tired of being “pushed around” that he ripped his cord and tried to run away. I spent roughly 10 hours making the first prototype and everybody I show him off too either laugh or ask how I did it. The best part of all is the little guy fits in with our IT Office. In fact my Company just built our first headquarters in a brand new top of the line building. Since we are also a computer repair shop I was commissioned to build 5 of these which we currently allow to run around our lobby autonomously during the day and entertain the walk-in customers. People really get a kick out of it. Such a great conversation starter and inadvertently cheers people up when they come into the bench with computer problems.
How:


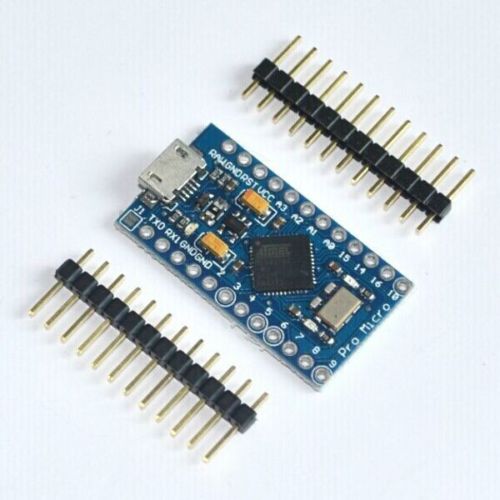
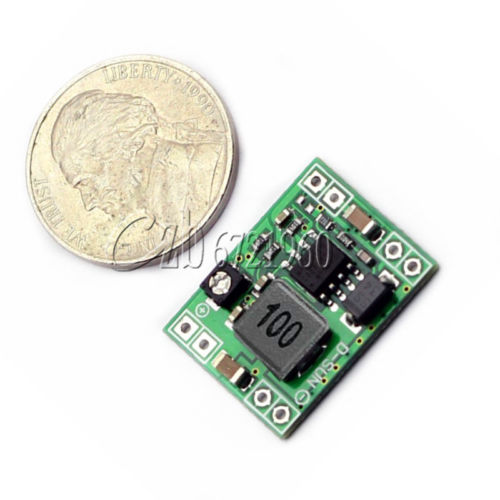
I spent a lot of time collecting the right sized parts and checking fit. Also carefully modifying the mouse body chassis to keep things looking normal on the outside while leaving me the space for everything on the inside. The hardest part was getting the wheels (22mm plastic gears) affixed to the motor outputs which were flat plates, a center hole, and a offset plastic tab. Broke 3 inner motor gears trying to screw into the center hole. Ended up taking a small piece of coat hanger and putting it in a drill while turning down with sand paper and files to the correct diameter of both the gear wheel and the inner motor hole. Then filed down a slot on the gear collar to fit the notch on the motor for extra strength. Everything pressed in perfectly and finished off with some carefully placed super glue. I wanted to keep the scroll wheel intact and moveable. This was easy to accomplish but took up a lot of room. Luckily found a cheap QTY of tiny adjustable voltage regulators that fit perfectly. Also reused the right mouse button as the power switch for the robot. Both buttons sit on a hot glue hinge to preserve their hand feel and you even allow youto hear the nice click on the button. Battery was pretty easy 9V high capacity why not right, but just barely fit in and allowed the mouse to close without leaving anything peeking out. I wanted some logic to this bot but still wanted the look while giving it some basic object avoidance and driving patterns. Tiny IR Sensors placed on either side of the front bottom lip worked out great. Also had based this guy off an ATTiny for size but found out the Pro Micro fit just right and gave me a lot more flexibility with programming, sensors and motor controls. Used L293D IC affixed under the pro micro and between its outputs for the motor controls, reversing and such. The best part was being able to use PWM pins for speed control to adjust for different driving surfaces.




Surprises:
I am still a little shocked at how well all of this worked together and how quickly this one went from my head to driving around my desk. I have done an increasing amount of these types of projects lately and they don’t ever go this well. Total cost for parts was probably around $25 if you account for parts broken during trial and error. They are amazingly durable as many have been kicked, pushed on by hands, forced around, or subjected to countless hours of office carpet driving. Also just love how people get a rise out of common objects with new life like this. It even gives people a shock but they just don't expect them to move on their own. To me this project was one of my very own personal favorites and hope you enjoy.
Also want to thank the LMR team for putting this site together. This is my first post and am so happy to start sharing my ideas and creations with like-minded people.
By Popular Demand!!!
Parts List:
Mouse: Old PS2 or USB mouse with scroll wheel. (One used in project was Logitech physical ball)
Motors: (Ebay Search “3v 5v Worm Gear Motor Variable Speed”)

IR Sensors: TCRT5000L Reflective Optical Sensor (Ebay Search “TCRT5000L”)

Wheels: 22mm Plastic Gears (Ebay Search “gear rack drive plastic”)

Microcontroller: Leonardo Pro Micro ATmega 32U4 (Ebay Search “Leonardo Pro Micro”)
Motor Driver: L293D IC (Ebay Search: “l293d”)

Drive Shafts: 3” piece of wire coat hanger (for attaching wheels to motor output)
Wire: CAT5e solid and removed from cable jacket.
Voltage Regulator: MP1584EN (Ebay Search “mini 3amp dc module”)
Resistors: 320r to 510r (Emitter Brightness 1 can be used for both sensors), 10Kr (One for each receiver to arduino analogue input)
Battery: 9V battery clip and battery
Power Button: Latching Contact Push Button Switch (Ebay Search ” Latching Contact Push Button Switch”)
