



My line follower robot
Hello, my line follower robot:
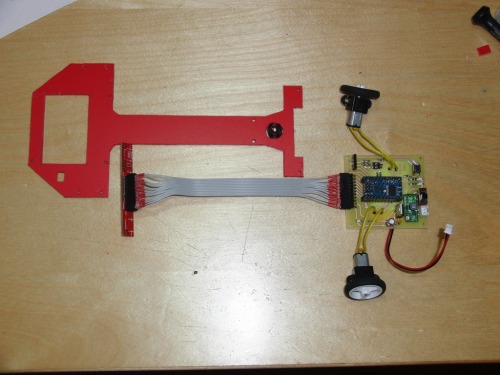
Components:
2 x Pololu 10:1 Micro metal gearmotor HP.
Baby Orangutan B-328.
QTR-8A Reflectance sensor array.
Pololu wheel 32x7 mm.
Pololu ball caster with 3/8" metal ball.
Pololu micro metal gearmotor bracket pair.
Pololu adjustable boost regulator 2.5-9.5 V.
3.7 V Lipo battery.
PD control.
http://www.youtube.com/watch?v=zDNGH7b0P74
Average speed: 2.1 m/s (minimum bend radius: 30 cm)
The code, schematics, pcb: http://webdelcire.com/wordpress/archives/619
http://webdelcire.com/wordpress/archives/350 (spanish)
line follower
- Actuators / output devices: 2 x micro metal gearmotor.
- Control method: PD control.
- CPU: Baby orangutan
- Power source: lipo 3.7V, dc-dc
- Programming language: C
- Sensors / input devices: Reflectance sensor array