


My hobby started with a
Hello friends, supporters!
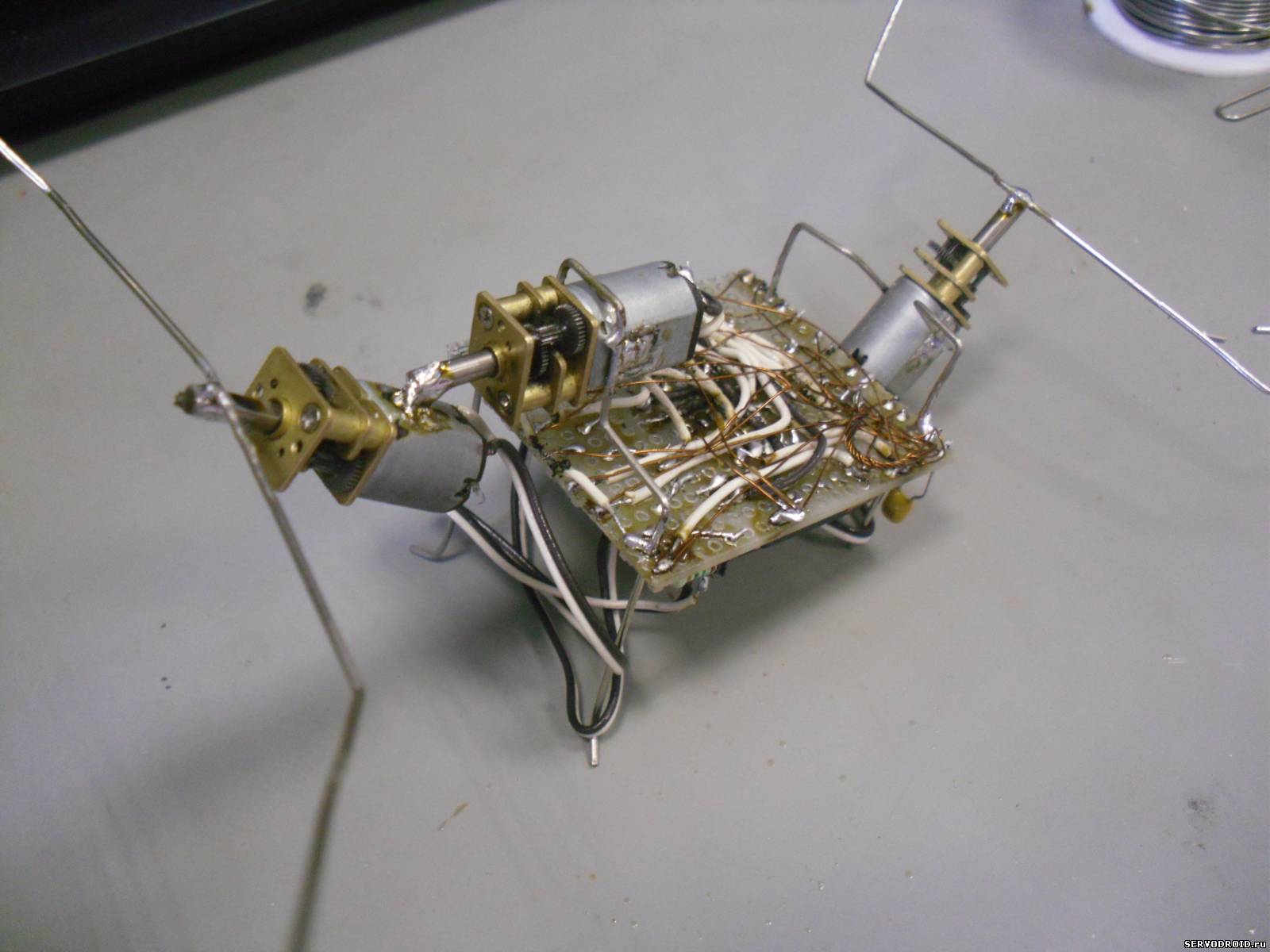
I want to show you my robot, assembled in BEAM technology (my favorite of the milestones of technology).
A little history ...
I lived in a small town in Russia, near the border of Norway. I went to school, and after a radio club. In the circle gathered different schemes, receivers, tweeters, calls (calls to do then was the fashion, each radioman had to collect them, reviewing old phone call in which two cups), and other simple and interesting devices. Parts in the circle strongly enough. We had two big-box score cards from top to bottom the different televisions and other equipment that is better than quantity, from the Soviet times. All parts had to look at these cards, carefully unsolder. And so, in the class 10 (and maybe 9) I wanted to collect something that can "live" alone, without outside help. Of course the answer to this was the word robot. I started to look in the magazines "Radio" (Journal of electronics, many schemes), and sometimes, very rarely, there appeared the scheme, but I could not get them apart. Then went online to look for. Stumbled upon the first step in Ait overseas, where they were vyakie walking robots.
I was immediately attracted by pictures, and in general all the articles on this site. Schemes were, a description (in English) but also was. Something like translated. Wry truth. But the part was understandable. The scheme also figured out ... I thought so. When ordered parts online store, and when they came to me already, it turned out that I forgot the third element, the chip 74NS14. And much to my chagrin had to leave the robot in a box on a shelf ...
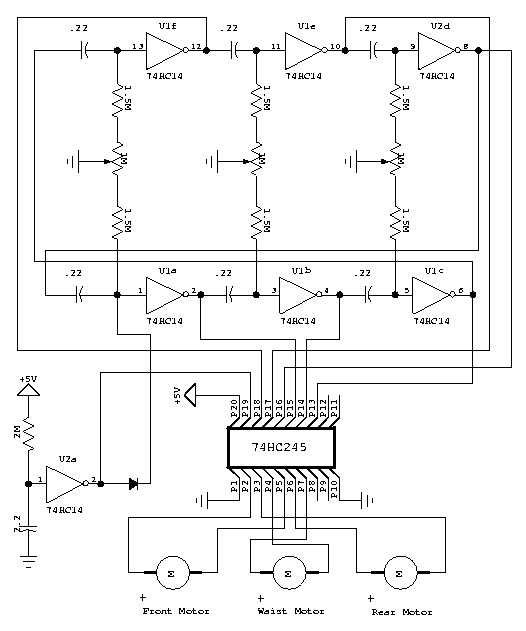
scheme (click)
Our time ...
He graduated from high school and enrolled at the College and the City of St. Petersburg. Place of study selected specifically in view of the city in which more radio store electronics. And now, I have a student, studying in St. Petersburg, and I have a lot of shops here that I buy now. Robotics, by the way, I'm not abandoned after an unsuccessful spooba in the circle. Yes, yes. Do not sit me on the spot and then zhelet. I formed a simple robot on the H-bridge. True and not so hot that worked, but worked all the same.
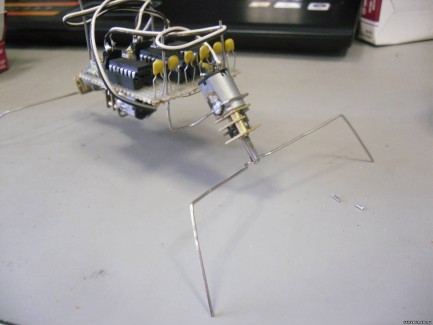
And, now, after 3-4 years, I decided to create a robot "that began my hobby robotics"! I bought all the parts assembled on the breadboard. Pike now you will see for yourself.
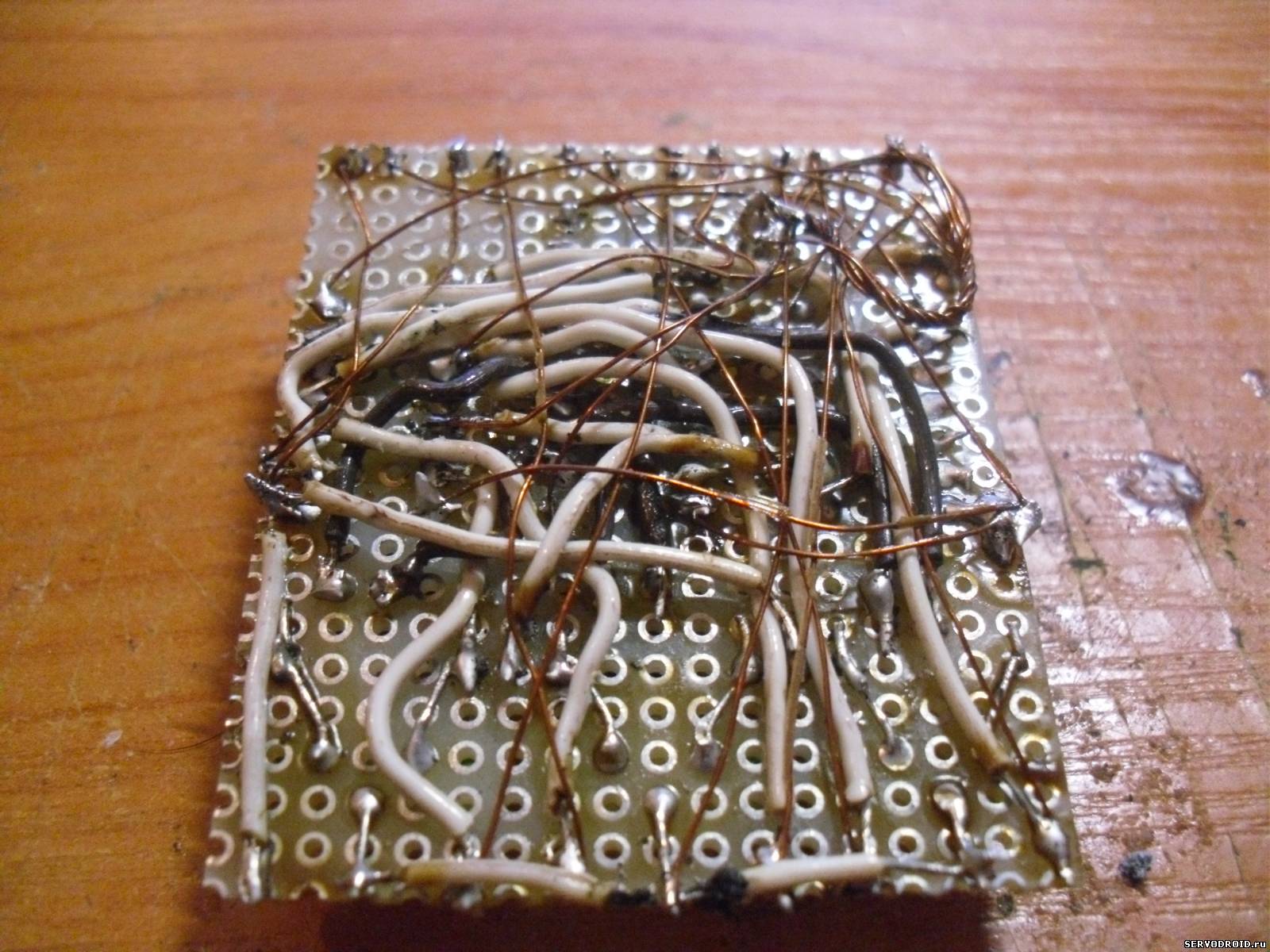
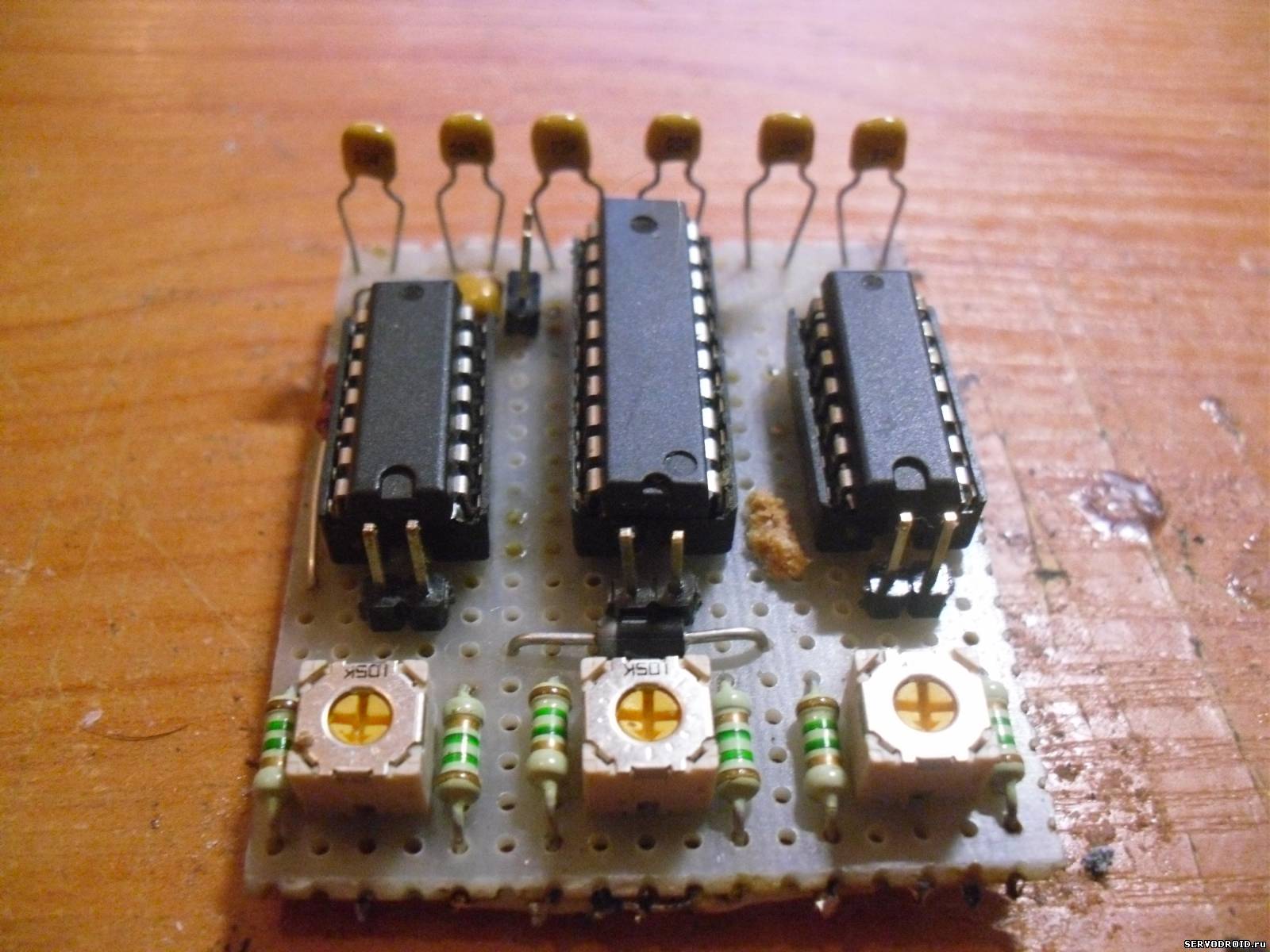
Little to say about the scheme and as a soldering circuit soldered with pervoggo times an hour for 4, and by placing logic elements, the robot has earned the first time! I can not believe, I usually robot from the first time did not run, be sure somewhere there was an error), but in this case no. Generally, I do not particularly prototyping boards much. Had a whole bunch of wires are soldered, but I do not fit them into a ball, and proodil as "tracks" so they do not overlap much and did not do hills. Then he decided to experiment more and took a wire copper wire. Everything seems to be OK.
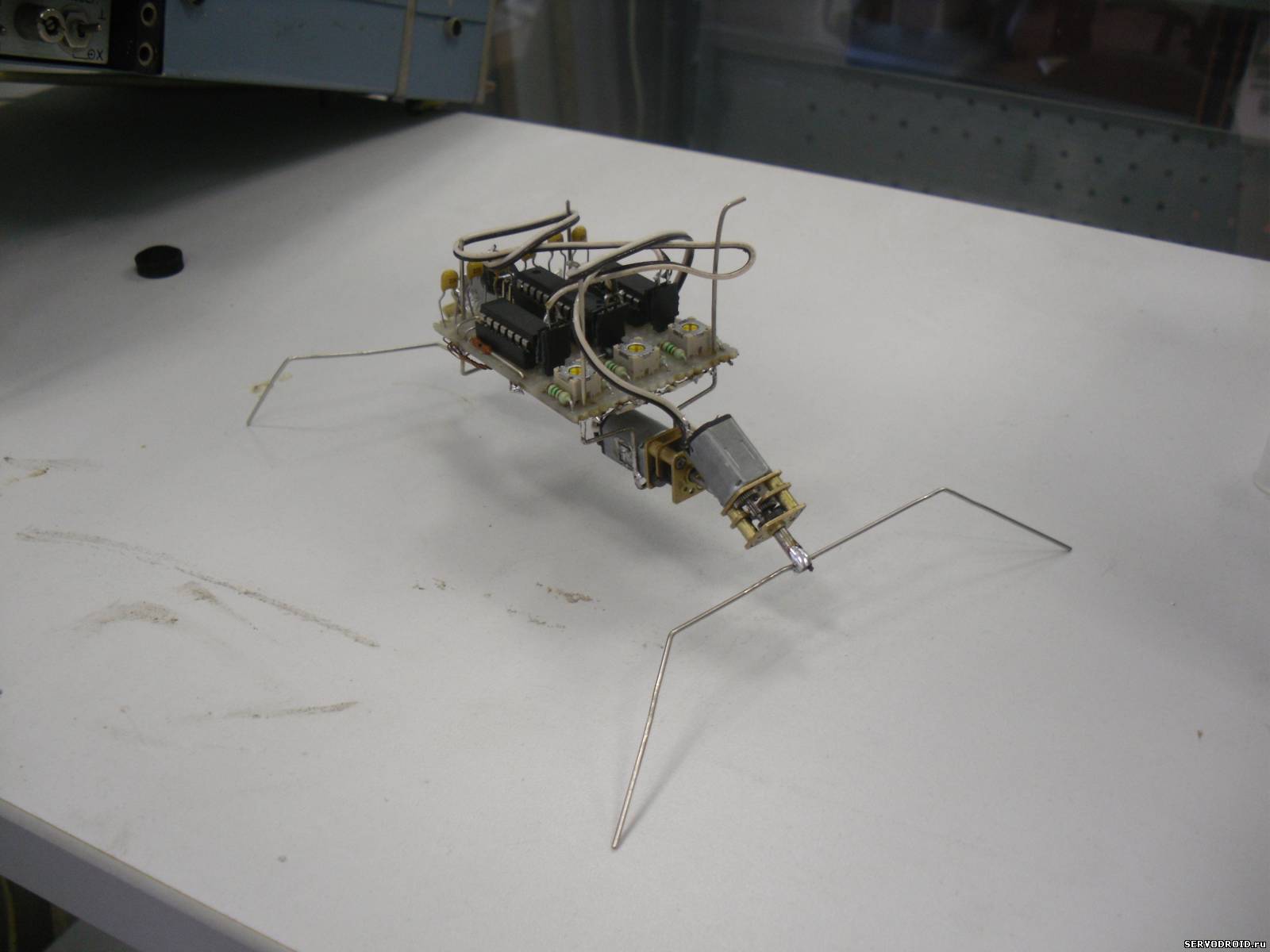
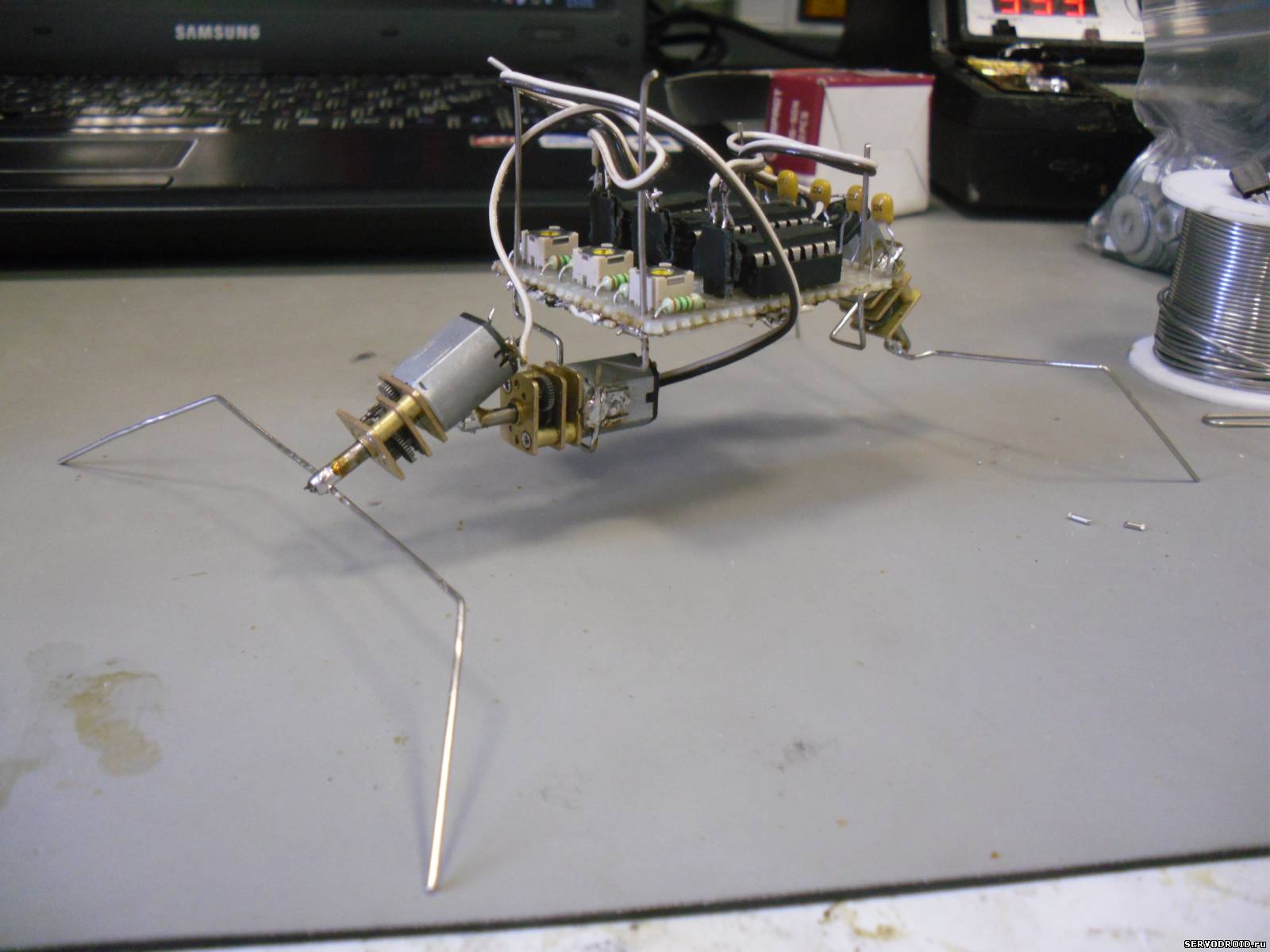
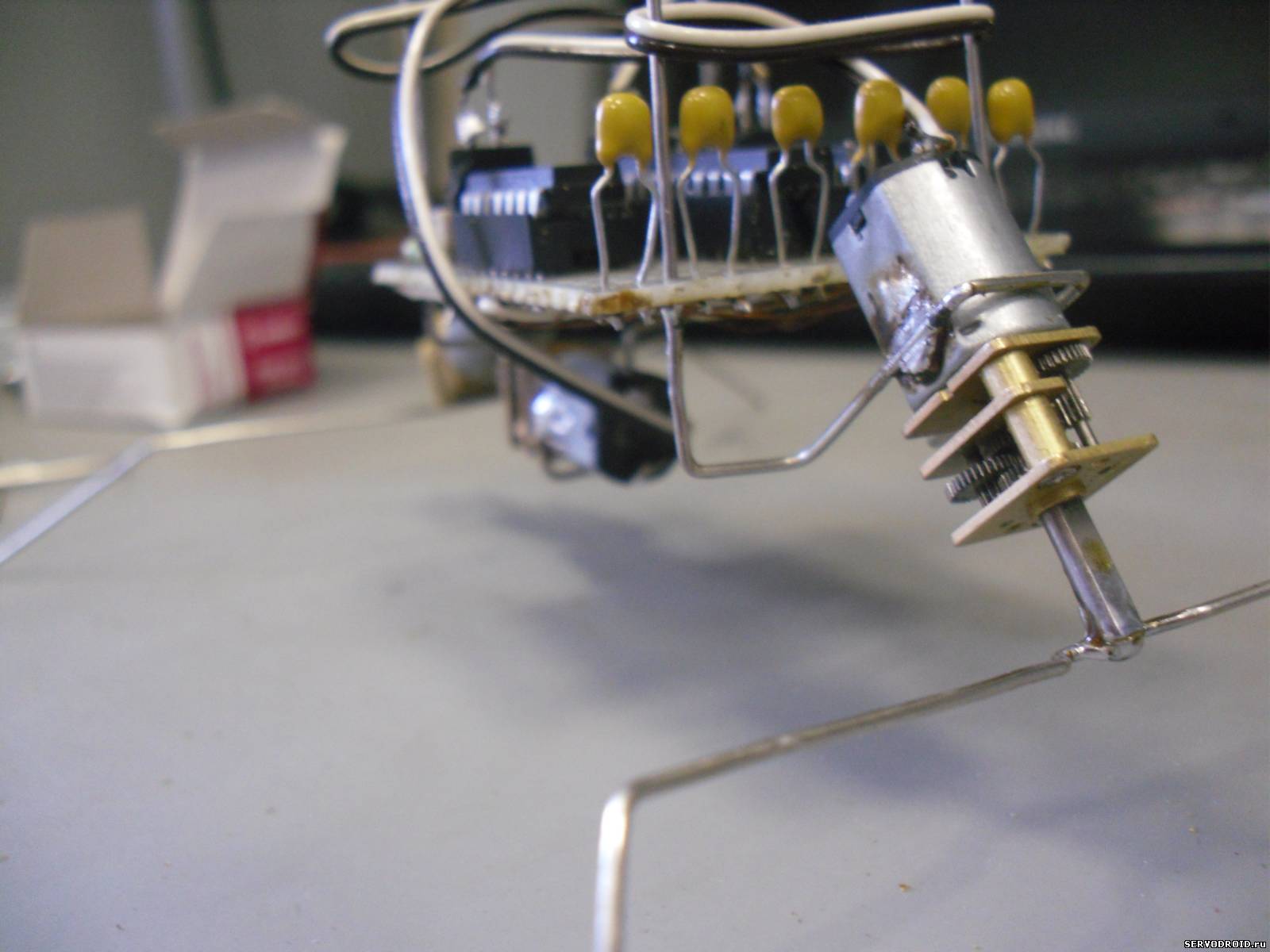
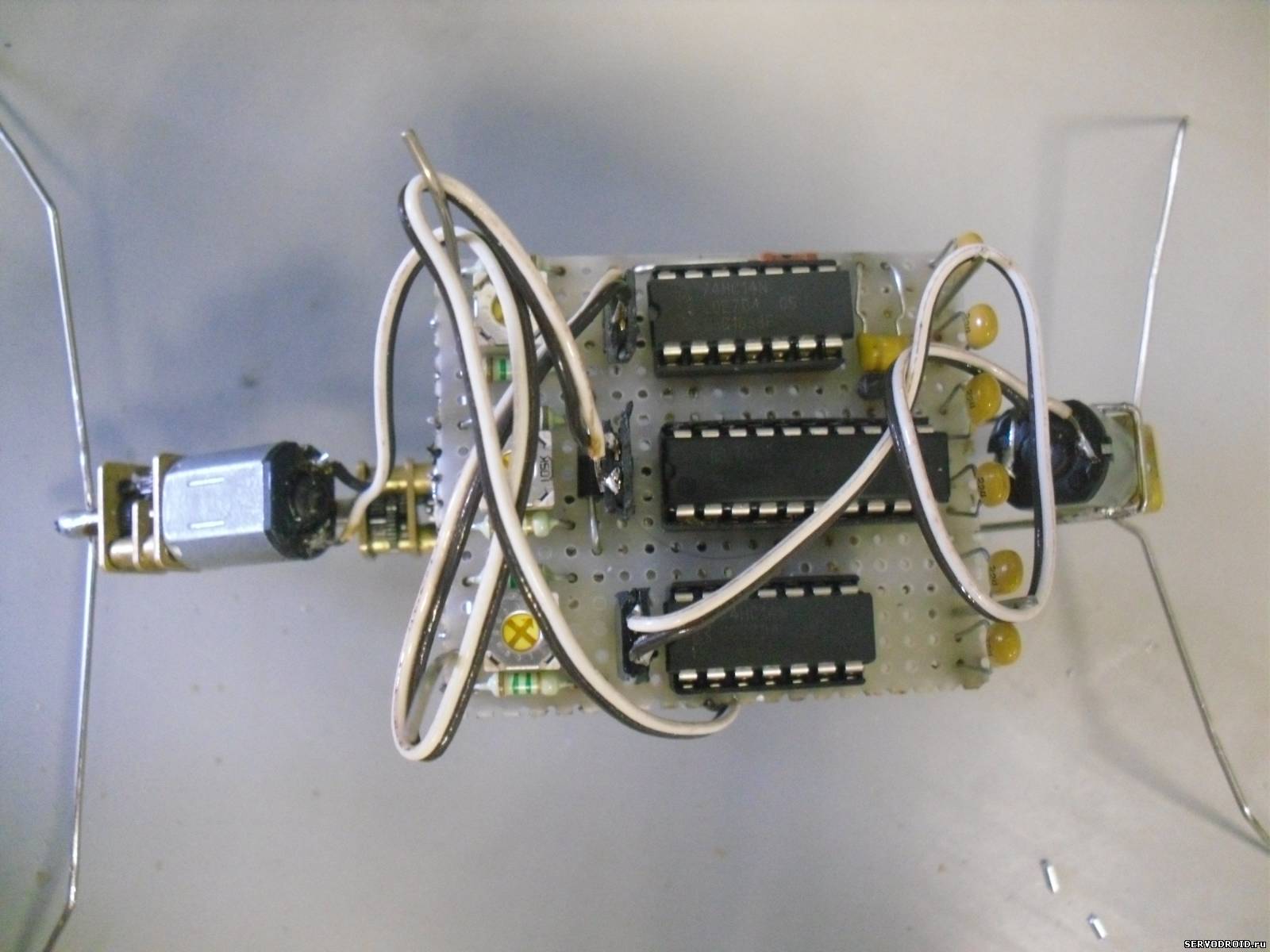
Robot started. Two motor paced third ... er ... You can probably say that trying-if you look closely, you'll see that twitches gear, but she seemed not to have enough length of the pulse to spin axis is sufficient.
But the two motors can be formed of the same robot. It is true because of my design, it nars flop over and crawl like a padded, sideways. It looks funny. Decreases due to the fact that I have motor third (central) just scrolled and changed the position of second motor in the horizontal and vertical)
Video: http://www.youtube.com/watch?feature=player_embedded&v=HSw024pyERk

BEAM-bo
- Control method: standart logic
- Sensors / input devices: none