


My first run at robotics
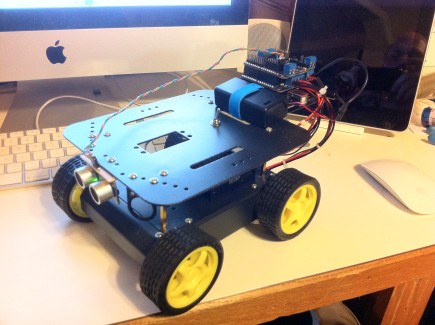
This is my first cut at programming a robot. Puting the kit together was pretty easy after dealing with some shipping damage. Then after some experimentation I got the bot wandering around without running into too much stuff.
Some of the issues that I ran into:
- interference from the motors before I installed .1uf capacitors across the motor terminals
- discovering that I really had no choice but to mount the "controls" on a panel off the top plate because the motor sheild and IO sheild with the arduino would not fit under the top plate.
- The usual learning curve to get to know a new language and its syntax.
The next step was to install a cheap servo, make a quick mounting bracket for the ping module, and of course rewrite the avoidance code to take advantage of the movable eyes. I will put up some video of the latest version soon.
Next will be to add a digital compass so that I can tell the thing to turn in degrees instead of miliseconds of runtime. I will probably also get better batteries and a Romeo all in one controller so that I can mount it on top of the chassis instead of the top plate.
Some future thoughts would be to add an arm to the top and move to IR for object detection. Hmm, I may need to move to a Mega to get enough ports for all the sensors and servos in the arm/grabber.
avoids objects
- Control method: Semi-Controlled / Autonomous
- CPU: Arduino diecimila
- Power source: 5AA and a 9V
- Sensors / input devices: Parallax Ping)))
- Target environment: indoor