


My First Rover Robot
Lurking a few months now in this forum I've been learning from all of you. I started assembling and playing with some Dagu robots like the Adventure bot and mini-biped and other kits available here locally, but practically the platforms were ready and the codes were complete and had to be just applied or sometimes tweaked.
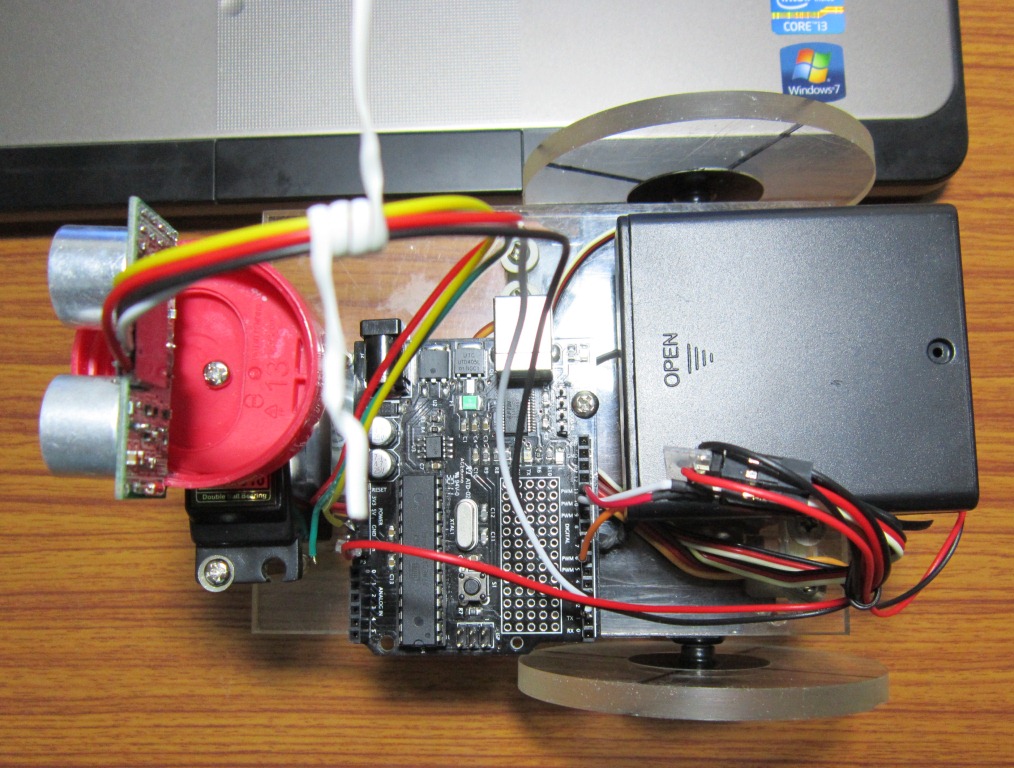
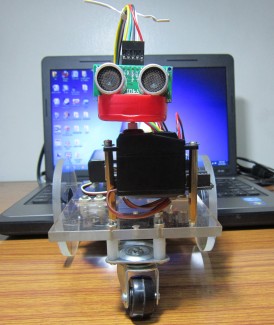
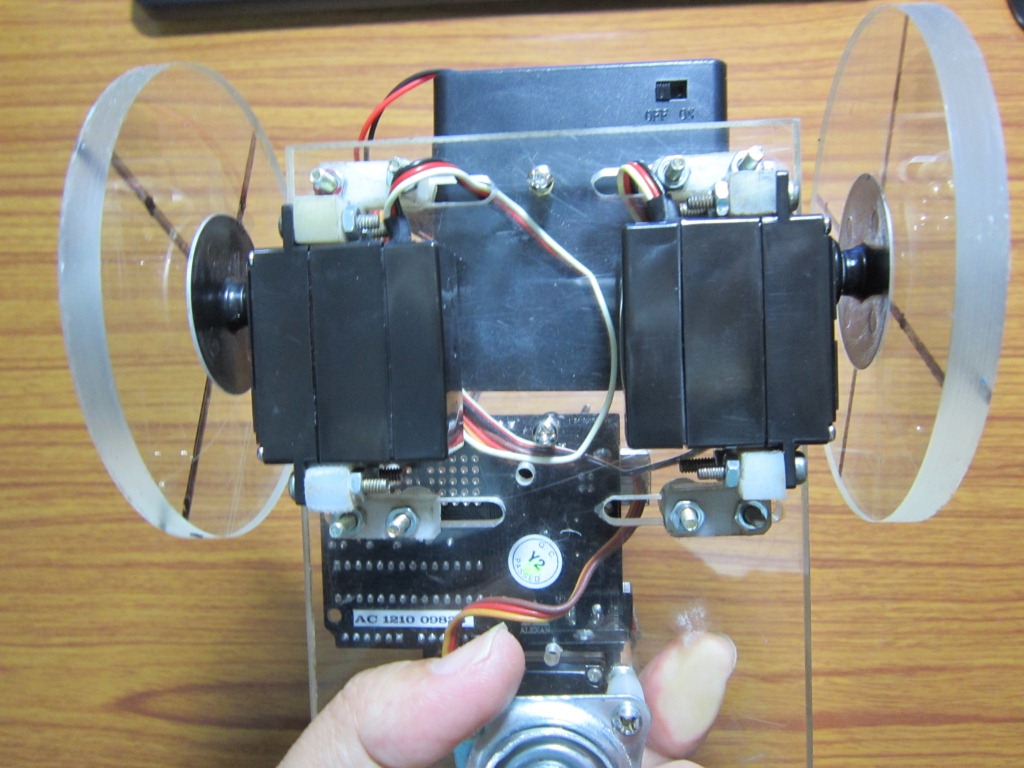
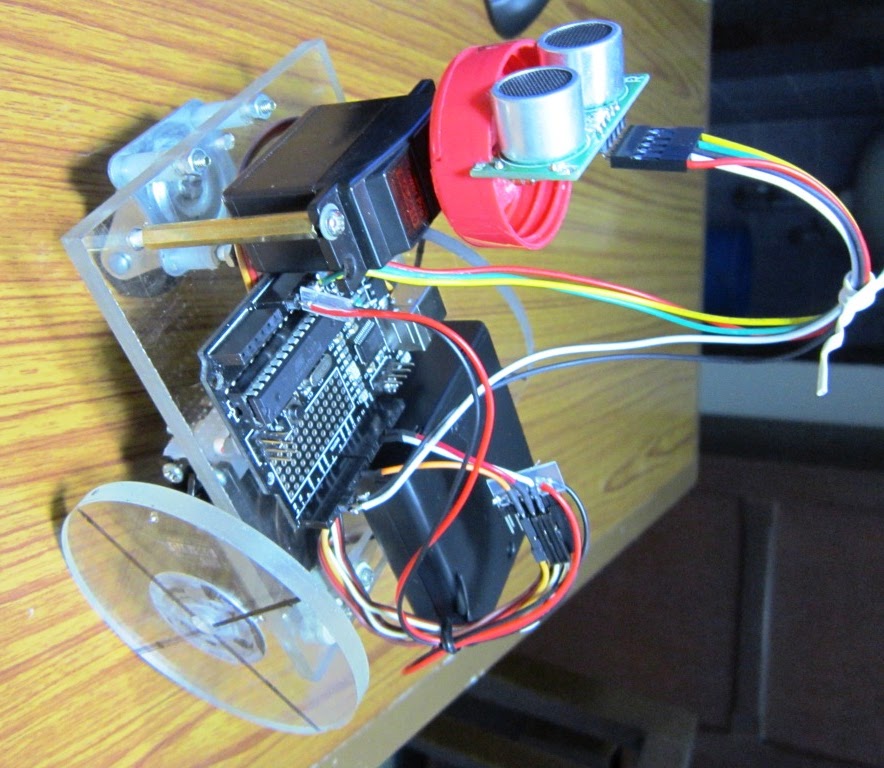
This time I had to work on my parts and the code (mix-n-match what I find). I bought three servos (Towerpro SG5010). Used one for the neck (panning). For the motor I converted the two into continuous rotation servos (instructions in this site). The servos came with these round horns but were too small for wheels, so I cut two plastic boards from my main hard plastic board and had them machined round into wheels with a hole and glued the round servo horns to them to attach the motors.
For the eyes (sensor), I used an SRF05 sonar sensor. I couldn't succeed with the single trigger/echo pin, so I used its SRF04 mode where one pin was for echo and the other for trigger. Battery case contained 4AA cells to give the 5-6v power needed to run both the servos, the sensor, and the arduino board. I used a locally made Arduino duemillanove compatible board called Aceduino (Philippines; another locally made board here is called Gizduino).
Since I do not have experience with programming, I made use of the SRF04 libraries found in the Arduino site and all pertaining information. I then searched this site for all first robots made with arduino using either motors or servo and tried to adapt their code snippets to the project.
Navigates via ultrasound sensor
- Actuators / output devices: 2 continuous rotation servos
- Control method: Autonomous.
- CPU: Atmega 328
- Operating system: Arduino
- Power source: 4 AA batteries
- Programming language: C
- Sensors / input devices: SRF05
- Target environment: indoor flat surfaces