


My First Robotics Platform!
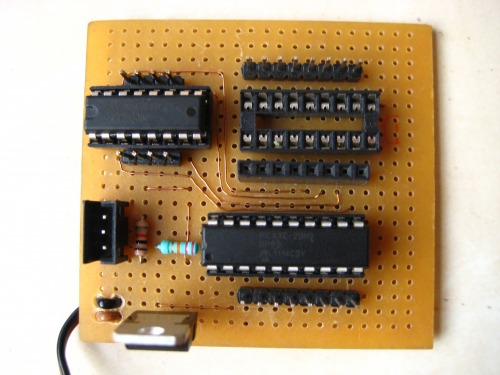
This is my picaxe 20m2 dev board. It has picaxe itself, a LM7805 voltage regulator and two DIL sockets, one for ULN2803 and the other for L293d (already in place). Those four copper wires (I know that looks a little unusual but there wasn't any other way in which i could connect picaxe with L293d :P) in the above photo are going from the output pins of the picaxe to the input pins of L293d.And I am using three polarised male headers set instead of that usual 3.5 mm jack for the programming purposes cause I think that 3.5mm female connector is a lot more space consuming.
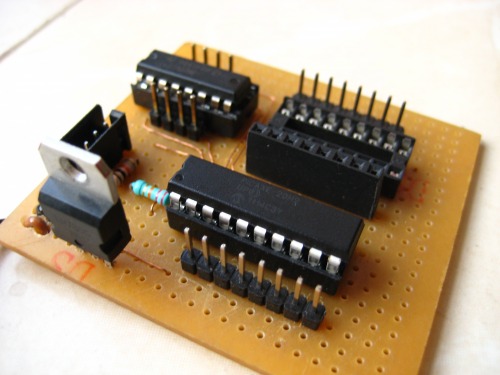
Another picture.
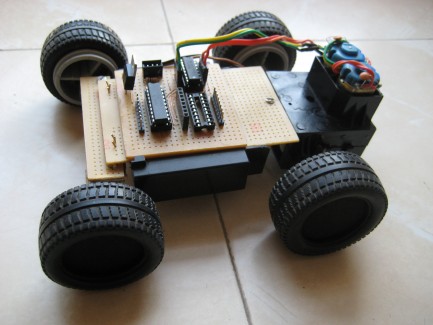
Here's the basic platform that i'll be working on in some of my starting robots. It has two geared motors (one for each side) which enables it to move.I choose this tank mechanism so that I can upgrade to tracks later on (I am working on making my own tracks). I have used a perf board to make the main chassis cause it is easier to add more components like proximity sansors, robotic arm etc. later (i can use male headers to keep the extra components in place). The batteries are positioned underneath the perf board.
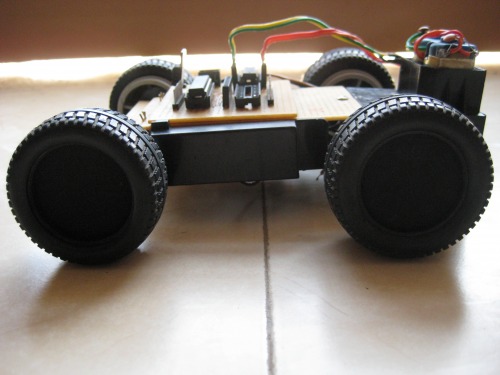
.Here's another picture

Comments, suggestions, advices are welcome.
Thank You :)
Navigates around
- Actuators / output devices: two geared motors (221:1)
- Control method: autonomous (very)
- CPU: Picaxe 20m2
- Operating system: windows 7 64bits
- Power source: 4 AA batteries
- Programming language: Picaxe basic
- Target environment: indorr and outdoor