


My first robot: X28
My first robot YAY
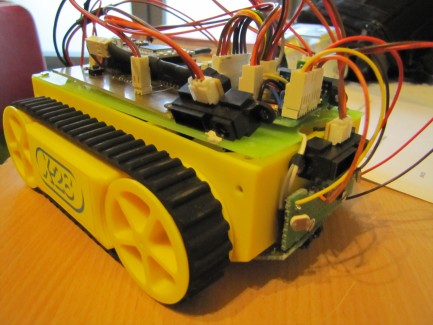
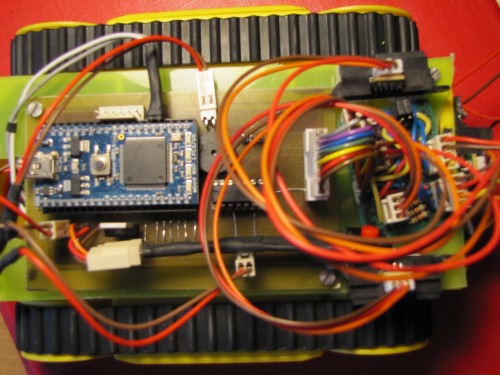
My robot is controled by an Mbed and uses 3 sharp IR sensors, 3 LDR and 2 line sensors to follow lasers lins and not bump in to stuff

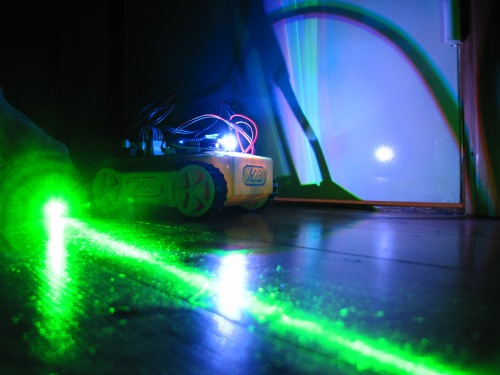

Navigate around via IR, Follows a laser, line follower, solve a mace, is awsome
- Actuators / output devices: motors, Buzzer, 4 LEDs
- Control method: autonomous
- CPU: Mbed
- Power source: 6x Chargeable AA
- Programming language: C++
- Sensors / input devices: Sharp IR, LDRs, line sensors
- Target environment: indoor