


My First robot (line maze/contact obstacle avoidance)
News (for those who don't want to read the article)
-I have got one of the line sensors working.
-I have got some basic line following going
-I have given up on this robot because I cannot get the motors to drive nearly streight enough for decent line following however it was a great first robot.
-my 2nd robot i havent even posted because I never got it working. I tried to make a micromouse that used 2 stepper motors. Unfortunatey as I was struggleing for space i used the same powersuply for the motors and the logic. BAD IDEA! whenever I tried using 2 motors it got through half a step and then the microcontroller just re-set. If I knew more about what I was doing I could probarbly keep the microcontroler running using some capacitors but im not sure how. One day I will re-make my circuits so that I can give the motors a seperate power supply in the mean time I will work on some more robots and see what I learn!
-my 3rd robot is based on stage 2 of the start here (after my previous faliour im going back to basics) it is coming on well and hoefuly Il make it a page soon. It has GM9 motors so hopefuly I will fare better with the linefollowing. For my next robot im going to use a baby orangutan microcontroller, some very small motors and some fancy batteries (and hopefuly some home made sensors https://www.robotshop.com/letsmakerobots/node/2907) to make a robot that (mostly) fits inside an old computer mouse. Then I may go back and make my 2nd robot work.
------------------------------this robot has been discontinued (see above)------------------------------------------
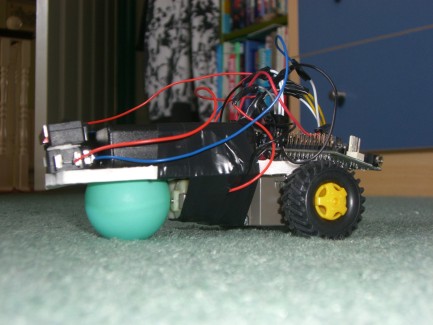
This is my first robot. I now have one of the line sensors working and both bumper switches. I will update the article with a better right up once I have finished the robot.
Parts: (will make a list on a later date)

some parts are not in the picture because they were delivered on a later date (more sensors and pre crimped cables).
Line Mazes and collision object avoidance
- Actuators / output devices: Tamiya twin gearbox, 4 red LEDs
- Control method: autonomous
- CPU: Picaxe 28x1
- Power source: 4 AA Rechargeable
- Programming language: Picaxe basic
- Sensors / input devices: bumper switches, Pololu analogue line sensors
- Target environment: indoor