


My first robot. Avoidance robot based on (and inspired by) the Start Here bot.
Hi All,
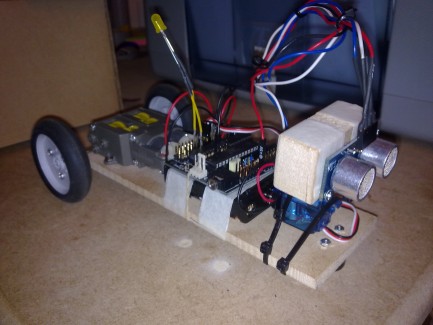
I wanted to share my first Robot with you. It's based on the Start Here robot. The range sensor is an SRF005. It has a Tamiya twin motor gearbox driven by the L239D motor driver chip on a 28X1 project board.
When I first tried the robot I found that it would get stuck in corners a lot so I added some of my own code so that if both the left and right hand distance is less than the danger level, the robot reverses and spins around. I then added an LED that comes on whilst the robot is "thinking". My plan is to now build a proper body to tidy things up and make it look nice now that I am happy with the code.
All comments good and bad are welcome.
Thanks for looking,
Paul :)