



My First Robot (At last!)
20:45 GMT, 2nd May 2012:
Hello everyone! Today I got my first package, containing everything I need for my PICAXE (including the actual PICAXE board) and a servo. I was suprised and extremely pleased to find that the PICAXE-28X1 actually has 4096 bytes as opposed to 256 (I now realise I was programming with the 28 selected, not the 28X1). The second package contains some female-female jumper leads, an IR sensor and a lead for it. Of course I got straight on with it and I've done everything I can so far, including;
- Adding pins to my PICAXE.
- Connecting the servo.
- Testing the servo delays in my program.
- Generally messing around with random code and For Loops (I got it to tick like a clock, not that it has any relevance.)
As for pictures there really isn't much to see. When my second package arrives and I make more progress I'll post something worth posting. Bye for now!
Update: 17:50 GMT, 4th May 2012:
I'm still waiting for my other package, so until then I'm afraid there really isn't much I can do and I still have nothing worth showing. I built a chassis out of two CDs and a bit of card but haven't put anything on it yet as I also need to buy some more double sided foam tape (my old roll went weird and stopped being sticky for some reason). I will also be working on the software as much as I can without having a robot to test it on. One more thing I plan to do over the next few days is experiment with all the motors I have and see which ones - if any - are suitable for my robot. If none of them are then that'll be another thing I have to wait for. :( Photos will be uploaded as soon as there's something worth taking a picture of. ;)
Update: 13:45 GMT, 5th May 2012:
Photos and video are finally here! At the moment the only video I have is of the servo moving. It's not very exciting, but it works. :D
Update: 15:36 GMT, 5th May 2012:
A brief description of the photos and video so far;
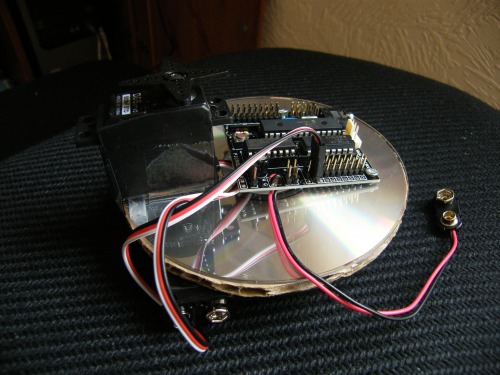
This picture shows the left side of the robot. The robot is facing to the left. The PICAXE-28X1 is screwed onto the chassis (albeit rather poorly) and the servo is stuck on with sellotape. I'll change all the sellotape to foam tape when I eventually buy some more.
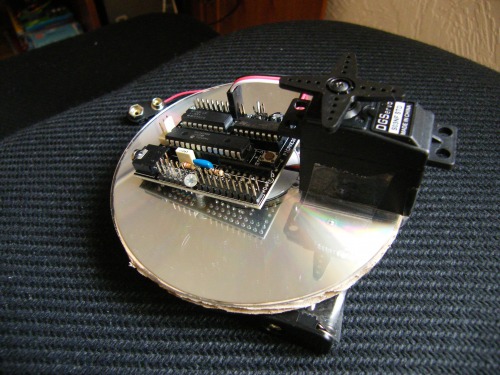
Same as above really, except from the opposite side, so the robot is facing to the right.
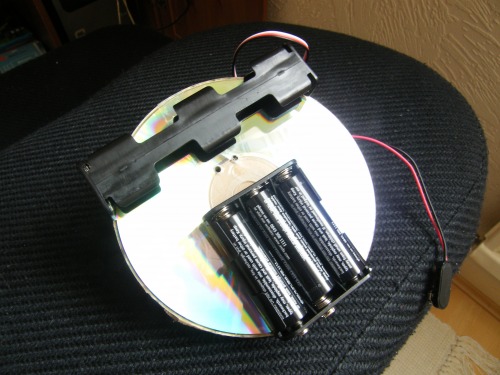
This picture shows the underneath of the robot. It is facing towards the top left of the picture. The reason there are two battery holders is so I can change between using 4 rechargables or 3 ordinary batteries easily. The spaces on either side of the 3-battery holder are for the motors to go.
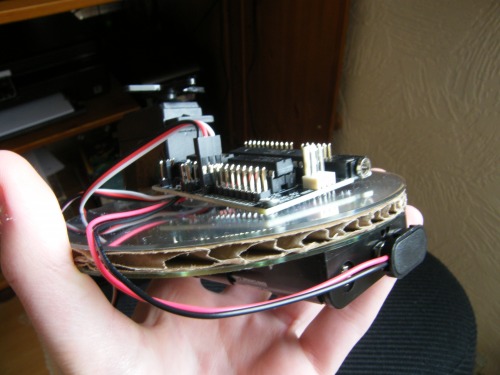
This picture shows the back of the robot and the battery clip plugged into the 3-battery holder.
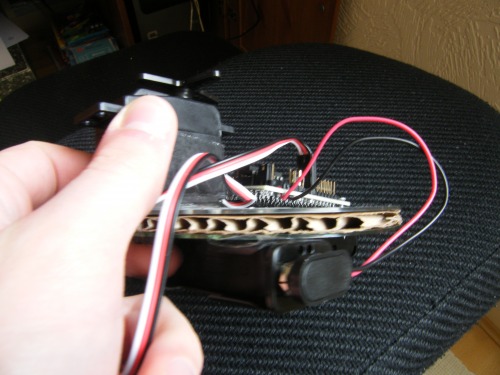
This picture shows the left side/front of the robot and the battery clip plugged into the 4-battery holder.
And you can click here for the video. It will open in a new window. That's it for now, I guess. Back to working on my programs. More will be posted here as soon as I get my second package, if not sooner. Oh, and if anyone wants more pictures or info, please let me know and I'll post it here.
Navigates via IR. Hopefully it will do that and much much more in the near future!
- Actuators / output devices: 2 geared motors at about 140:1 (hopefully!)
- Control method: autonomous
- CPU: Picaxe 28x1
- Operating system: Windows vista
- Power source: 3 AA non-rechargeable batteries or 4 AA rechargeable batteries
- Programming language: Picaxe basic
- Sensors / input devices: SHARP IR sensor
- Target environment: Indoors in a tight space due to the range of the IR.