


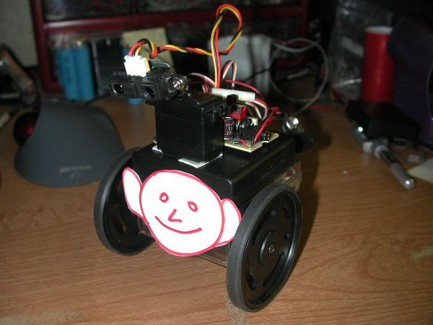
My first robot
Fritsl and a few others here helped by those walkthroughs and tips. See fritsl im am a perfect expamle of he who reads does it.All those and a few mistakes brought me to the finished product.
I used fritsl first robot but used other things rather than his exact. I used servo powere and ir for seeing. I also used the lowly picaxe 08m chip.
The bot has seperate mainboard and servo suppies. main is 3 aaa cells and servos on 4 aa cells in a shack box complete with power switch.i even put a switch on the picaxe protoboard to allow flip flip of program to run mode.You see the 08m uses port 0 as serin as well as out for general use.I run the head servo on that port.ADC ir is on port 1 both motors go on ports 2 and 4. This leaves only one port (3) left and it is an input port only.Now who can tell me what i can use on that port for navigation.
The code (all 122 bytesa of it) is all fritsl original i just modified it a whole lot to fit my bot and his learning curve. See fritsl i am teaching not commanding.It is slower but wow the results are astonding.The source code is free for personal use but fritsl gets all the royalties for you commercial types looking to cash in on coding.I am just pleased to have had so many wonderfully sharing people to give so that i could achive this. You are are too cool...Thanks for being there folks.
I will have a video posted on youtube and willl link it here very soon.
navigate with ir
- Actuators / output devices: futaba s3002 servos
- CPU: picaxe 08M
- Power source: main board 3 aaa cells servos 4 aa cells
- Programming language: pbasic 2.5
- Sensors / input devices: Sharp GP2D120 IR sensor
- Target environment: indoor floor